
本文提出了一种改进的EKF算法。利用在垂直地面方向上的位置变化缓慢这一运动特性,建立了改进EKF算法的系统模型,并通过理论分析得到了滤波器参数,最后利用真实的卫星数据进行
2011-08-11 13:45

本文分别利用CDKF、UKF和EKF三种方法对车辆GPS/DR组合导航系统进行了滤波实验,实验结果进一步表明CDKF方法明显优于EKF和UKF方法,是车辆组合导航中一种更理想的非线性滤波方法,从而真
2012-07-16 17:16
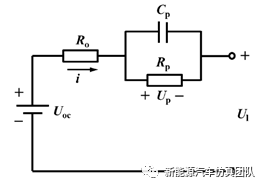
本文以锂离子电池为研究对象,选取Thevenin模型描述电池的动态行为,基于脉冲充放电数据,对电池模型进行参数辨识。
2023-06-28 11:24
四旋翼飞行器是一种能够实现垂直起降、悬停、偏航等复杂动作的多旋翼无人机,因而在军事和民用领域的应用前景十分乐观[1],但其自身系统的复杂性以及易受外界空气动力和不确定因素影响的问题一直困扰着科研人员。
2018-06-13 16:01
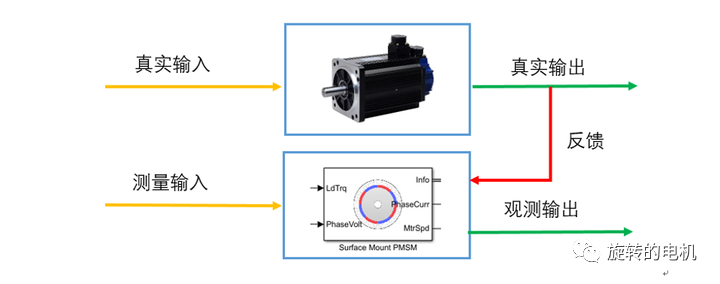
本章节采用扩展卡尔曼滤波进行永磁同步电机的无传感器控制,首先分析了扩展卡尔曼滤波的原理,然后基于扩展卡尔曼滤波对PMSM进行状态估计,最后通过Matlab/Simulink对该方案进行仿真分析。
2023-06-08 14:42
目前国内外基本都采用SOC来作为描述动力电池容量状态的内部参数。电池SOC估计是否准确对于电池来说关系重大,会直接影响动力电池使用寿命和电动汽车的行驶里程。
2023-06-29 11:09
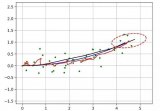
该算法利用扩展卡尔曼滤波器(Extended Kalman Filter, EKF)实现传感器混合本地化。 蓝线为真实路径,黑线为导航推测路径(dead reckoning trajectory),绿点为位置观测(如GPS),红线为EKF估算的路径。
2023-09-22 15:58

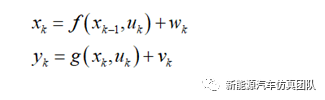
卡尔曼滤波是通过对下一时刻系统的状态估计以及测量得出的反馈相结合,最终得到该时刻较为准确的的状态估计(预测+测量反馈),我们一般所说的卡尔曼滤波KF是针对线性系统的,其思想对于非线性系统也是适应的,由此延伸出来的有EKF,UKF等。
2023-07-14 11:46
本文针对火星上直升飞机执行任务场景,设计了一种基于事件相机的事件-视觉-惯性里程计(EVIO),其前端采用改进的EKLT特征跟踪算法,后端采用误差状态扩展卡尔曼(Error-state EKF)优化位姿。
2022-11-14 16:01
