
EKF利用泰勒级数方法,将非线性问题转化到线性空间,再利用卡尔曼滤波器进行滤波,并达到一阶估计精度。PF是一种采用蒙特卡罗采样的贝叶斯滤波方法,它将复杂的目标状态分布表示
2012-05-07 15:31
偏差。对此,提出基于四阶多项式磁饱和模型以及扩展卡尔曼滤波(EKF)的全状态估计算法,以定子电流作为反馈,观测转子磁链的同时,辨识互感参数。仿真及实验结果表明所提算法能降低磁饱和非线性对控制系统的影响。
2017-12-29 15:56
为了提高直接转矩控制(DTC)系统定子磁链估计精度,降低电流、电压测量的随机误差,提出了一种基于扩展卡尔曼滤波(EKF)实现异步电机转子位置和速度估计的方法。扩展卡尔
2010-11-22 16:18
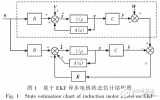
为了提高直接转矩控制(DTC)系统定子磁链估计精度,降低电流、电压测量的随机误差,提出了一种基于扩展卡尔曼滤波(EKF)实现异步电机转子位置和速度估计的方法。扩展卡尔曼滤波器是建立在基于旋转坐标系下
2017-12-06 10:14

在同一逆变器供电下的两台永磁同步电机(PMSM)串联系统,可运用矢量控制技术实现独立解耦控制。本文提出了一种基于EKF的两台五相PMSM串联系统的扩展Kakman滤波器(EKF)转速估计方
2011-10-24 11:58
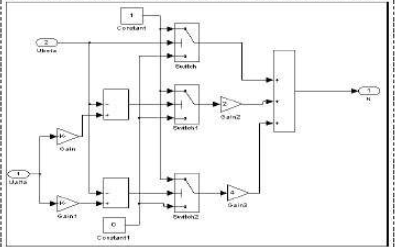
本文档的主要内容详细介绍的是永磁同步电机simulink仿真模型双闭环和EKF的详细资料说明。
2020-03-27 08:00
。 百度百科是这样说的,也就是说卡尔曼滤波第一是递归滤波,其次KF用于线性系统。 但经过研究和改进,出现了很多卡尔曼,如EKF(extended kalman filter)扩展卡尔曼,UKF(Unscented Kalman Filter)无迹卡尔曼等等。
2023-05-10 17:51
介绍了采用MC56F8013 芯片实现的永磁同步电机无位置传感器调速系统和一种基于EKF(扩展卡尔曼滤波)实现PMSM 转子位置和速度估计的方法,通过检测电机端电压和流过定子线圈的电
2009-04-03 09:43

卡尔曼滤波是一种线性最小方差估计,是一种最优估计算法。 其采用递推算法,通常只要系统的初始状态和初始误差矩阵已知,根据导出公式,就可对 系 统状态做出较为精确的估计。 使用状态空间法在时域内设计滤波器,其离散型算法较容易实现数字化。
2023-03-14 10:38
方元奇的论文
2017-04-11 10:54