电子发烧友
1.1w次浏览

本文提出了一种改进的EKF算法。利用在垂直地面方向上的位置变化缓慢这一运动特性,建立了改进EKF算法的系统模型,并通过理论分析得到了滤波器参数,最后利用真实的卫星数据进行
2011-08-11 13:45

EKF利用泰勒级数方法,将非线性问题转化到线性空间,再利用卡尔曼滤波器进行滤波,并达到一阶估计精度。PF是一种采用蒙特卡罗采样的贝叶斯滤波方法,它将复杂的目标状态分布表示
2012-05-07 15:31
ERJ3EKF4751V
2024-06-20 22:51
ERJ3EKF2263V
2024-06-20 22:58
偏差。对此,提出基于四阶多项式磁饱和模型以及扩展卡尔曼滤波(EKF)的全状态估计算法,以定子电流作为反馈,观测转子磁链的同时,辨识互感参数。仿真及实验结果表明所提算法能降低磁饱和非线性对控制系统的影响。
2017-12-29 15:56

本文分别利用CDKF、UKF和EKF三种方法对车辆GPS/DR组合导航系统进行了滤波实验,实验结果进一步表明CDKF方法明显优于EKF和UKF方法,是车辆组合导航中一种更理想的非线性滤波方法,从而真
2012-07-16 17:16
采用遗传算法对 EKF 中的系统噪声矩阵和测量矩阵的协方差进行在线优化,以实现在模型误差最小时对 SOC 进行在线估计
2020-03-12 12:27
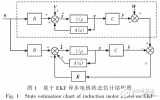
为了提高直接转矩控制(DTC)系统定子磁链估计精度,降低电流、电压测量的随机误差,提出了一种基于扩展卡尔曼滤波(EKF)实现异步电机转子位置和速度估计的方法。扩展卡尔曼滤波器是建立在基于旋转坐标系下
2017-12-06 10:14
ERJ-3EKF9532V
2023-03-28 14:25
ERJ3EKF1623V
2024-06-20 23:01