: roslaunch stixel_ros_cc stixeltest.launch 3.rviz的使用 新开一个终端运行: rviz 学习更多编程知识,请关注我的公众号: [代码的路]
2023-01-12 17:44
在过滤周围环境点云后,在rviz中点击Capture sample采集样本,会出线绿色框代表根据点云拟合出来的标定板平面
2022-11-17 11:22

本文围绕创龙科技研发的评估板,详解 ROS2 系统使用方法。涵盖 ROS2 环境搭建、核心概念讲解、节点通信测试、功能包创建与编译,以及可视化工具 RViz 的使用,还包括基于评估板的 ROS2 应用案例演示,帮助开发者快速掌握评估板上 ROS2 系统的部署与基础应用开发。
2025-10-30 13:46

ROS有着丰富的辅助开发工具,包括可视化工具Rviz,仿真工具gazebo。此外,ROS也有着庞大的开发者基础,支持的功能包也涵盖优化,控制,导航,视觉,AI等领域。如果有机会,我们后面会选取SOTA成果,对包做测评。
2023-10-08 11:32

其中,SLAM算法插件提供了SLAM领域流行的优秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,这些插件可以直接集成到自己的代码中,研究人员也可以基于这些插件进行进一步研究或者贡献自己的插件。此外Rviz也被集成到了这一框架中进行可视化交互,让用户可以复用ros中的技能和知识。
2019-03-07 09:42
launchoriginbot_autonomous originbot_mpc.launch.py 同时,打开rviz后可以在界面中看到,有如下轨迹显示 原理浅析 PurePuesuit 和 MPC 算法是自动驾驶中常用的控制算法,目的是为了让规划处的轨迹点更加平滑以及满足车辆本身的运动学轨迹。
2023-11-15 14:29
rviz GUI发现ROS(机器人操作系统)后,我的软件才更适合于此。由于具备ROS的现成机器人有些昂贵,因此我决定围绕Wild Thumper 4wd底盘建造一个新机器人。几周内,硬件和电子设备几乎完成。从那时起,我花了一些时间进行调整。目标是能够
2020-12-25 15:11
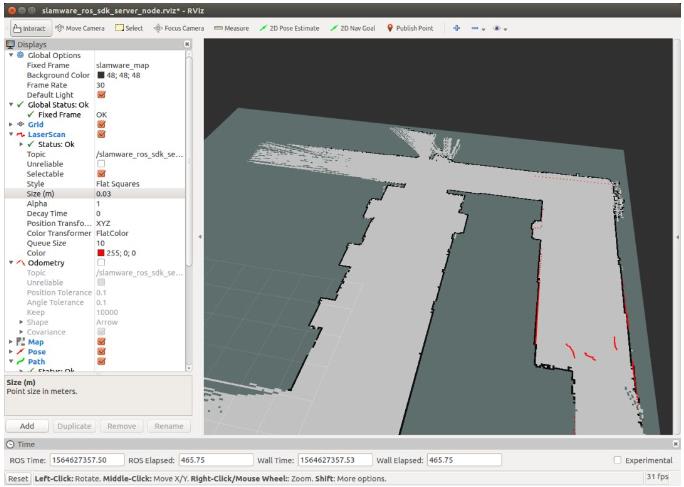
或者建图雷达产品,一开始在RViz中显示的只是一张地图信息,想要用键盘控制机器人移动方向,发现并不奏效?这时候,参阅SLAMWARE ROS SDK开发文档可以发现
2019-10-30 09:16