
本文分别利用CDKF、UKF和EKF三种方法对车辆GPS/DR组合导航系统进行了滤波实验,实验结果进一步表明CDKF方法明显优于EKF和UKF方法,是车辆组合导航中一种更理想的非线性滤波方法,从而真
2012-07-16 17:16

卡尔曼滤波是通过对下一时刻系统的状态估计以及测量得出的反馈相结合,最终得到该时刻较为准确的的状态估计(预测+测量反馈),我们一般所说的卡尔曼滤波KF是针对线性系统的,其思想对于非线性系统也是适应的,由此延伸出来的有EKF,UKF等。
2023-07-14 11:46
本文给出了一种加权最小二乘一卡尔曼滤波(WLS-KF)算法,它利用一组离散采样点,通过WLS方法产生近似线性化预测模型,然后用KF算法对此模型进行校正。以该算法为思路,将其应用在GPS非线性动态滤波定位解算中,仿真结果表明该算法精度介于EKF和UKF之间,从而实现了对目标较高精度的定位和跟踪。
2020-08-27 09:43
信息时DSP利用UKF滤波算法,将预测定位信息发送给ARM芯片,并标记为预测信息,且显示在TFT液晶屏上。
2021-06-29 11:04
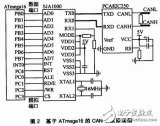
改进的空间,滤波性能有待进一步优化提高。在现有自适应UKF算法的基础上,改变比例对称采样策略的相关参数可达到较好的滤波效果。现有的以ATmegal6为微处理器的CAN总线程序还有一些不完备之处,本文采用PeliCAN模式加入了完备的错误分析程序,并支持系统自身测试功能。
2018-06-15 08:43

无迹卡尔曼滤波器 (UKF) 等概率滤波器,来递归估计机器人的状态并根据传感器测量值更新地图。该滤波器根据机
2024-10-02 16:39