近年来,基于视觉的传感器在SLAM系统中显示出显著的性能、精度和效率提升。在这方面,视觉SLAM(VSLAM)方法是指使用相机进行姿态估计和地图生成的SLAM方法。
2022-11-01 09:53

为了能让基于事件相机的vSLAM在事件数据上实现位姿估计和三维重建,研究者设计出了多种多样针对事件相机的数据关联、位姿估计和三维重建的解决方案。我们将主流的算法分类为四种类别,分别为特征法、直接法、运动补偿法和基于深度学习的方法。
2023-05-12 11:51

vSLAM能够通过视觉传感器来获取环境信息,以达到估计机器人位姿和周围环境三维重建的目的。但是传统的视觉传感器受限于它的硬件而导致的低动态感光范围和运动中产生的动态模糊,在一些复杂的场景下无法得到良好的结果,例如高速运动中的或者复杂的光照条件下的场景。
2023-05-09 15:49
在移动机器人领域,2018年最大的技术进展莫过于VSLAM技术在该领域的应用突破了,它将让移动机器人自主行驶有更广阔的空间。对机器人企业而言,VSLAM是令人头疼的事情,现如今有一家企业把它做好了,对其它企业而言,就省事多了。
2019-03-02 10:09
首先就是数据量的问题,深度学习是非常吃数据的。模型越大,想让网络权重收敛所需的数据规模也就越大。
2022-11-10 09:48

针对现有VSLAM系统语义表达不足、地图可解释性差的问题,本文提出vS-Graphs,一种实时多线程VSLAM框架。该方案显著提升了重建地图的语义丰富度、可解释性及定位精度。实验表明
2025-04-19 14:07
大联大控股宣布,其旗下世平推出基于英特尔(Intel)Movidius Myriad 2的双目VSLAM空间定位解决方案。
2019-12-05 16:17
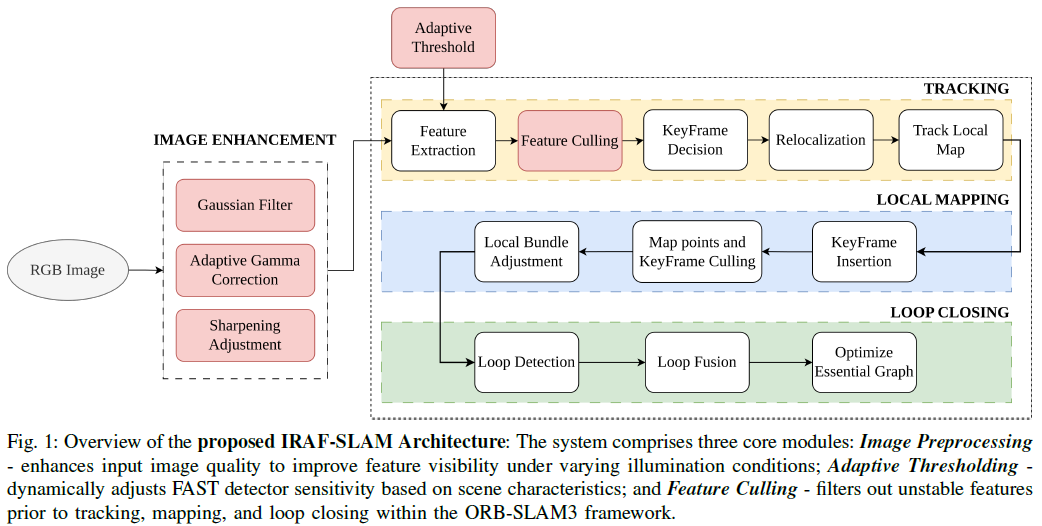
现有的基于特征的VSLAM系统依赖于固定的前端参数,这使得它们在面对光照突变时显得十分脆弱,且特征跟踪也不稳定。为应对这些挑战,我们提出了“IRAF-SLAM”,这是一种具备光照鲁棒性且能自适应特征筛选的前端设计,旨在提升VSLAM在复杂且具有挑战性环境中的抗干扰
2025-07-30 10:38
(NITROS),其中包括针对 NVIDIA GPU 和 Jetson 平台 高度优化的图像处理和计算机视觉功能。 Isaac VSLAM ROS 2 软件包使用 Isaac Elbrus GPU 加速
2022-11-10 11:00
