近年来,基于视觉的传感器在SLAM系统中显示出显著的性能、精度和效率提升。在这方面,视觉SLAM(VSLAM)方法是指使用相机进行姿态估计和地图生成的SLAM方法。
2022-11-01 09:53
首先就是数据量的问题,深度学习是非常吃数据的。模型越大,想让网络权重收敛所需的数据规模也就越大。
2022-11-10 09:48

针对现有VSLAM系统语义表达不足、地图可解释性差的问题,本文提出vS-Graphs,一种实时多线程VSLAM框架。该方案显著提升了重建地图的语义丰富度、可解释性及定位精度。实验表明
2025-04-19 14:07
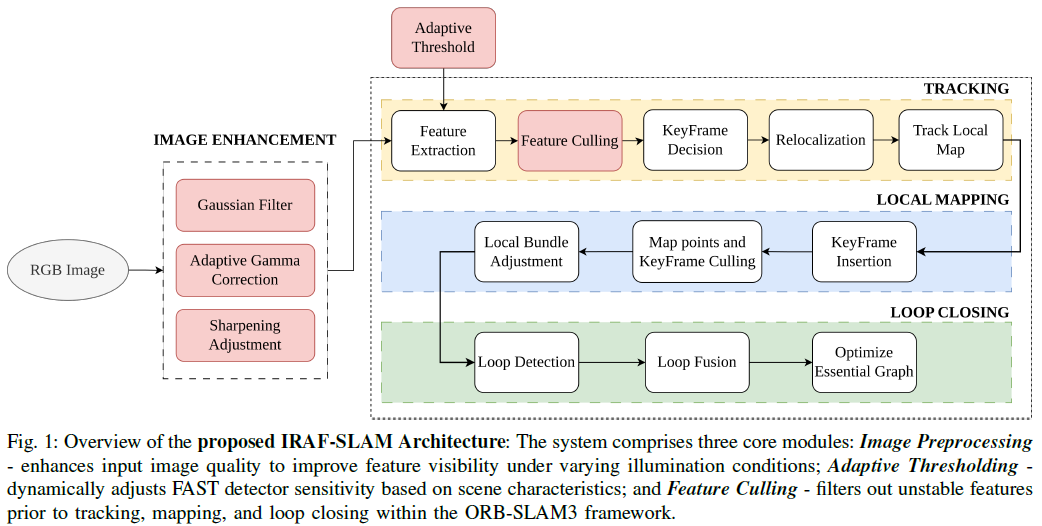
现有的基于特征的VSLAM系统依赖于固定的前端参数,这使得它们在面对光照突变时显得十分脆弱,且特征跟踪也不稳定。为应对这些挑战,我们提出了“IRAF-SLAM”,这是一种具备光照鲁棒性且能自适应特征筛选的前端设计,旨在提升VSLAM在复杂且具有挑战性环境中的抗干扰
2025-07-30 10:38

本文提出了一种新方法,通过使用点到平面匹配将VIO/VSLAM系统生成的稀疏3D点云与数字孪生体进行对齐,从而实现精确且全球一致的定位,无需视觉数据关联。所提方法为VIO/VSLAM系统提供了紧密
2024-12-13 11:18

本文提出一种新型主动照明框架,通过动态控制可移动光源主动照亮高纹理区域,显著提升VO与VSLAM算法在极端光照条件下的性能。在真实机器人平台上进行的实验表明,相比传统固定照明方法,本文方法可将姿态估计误差最高降低75%。
2025-02-28 14:29