网友的问题如下: domono老师,saber仿真中遇到最多,最复杂的一个问题--- 不收敛.这是对我们初学者最大的困难.今天又遇到,做DC分析出现如下错误: *** ERROR "ALG_SINGULAR_JACOBIAN" ***
2010-06-19 15:56
,一般都能解决。当然也有其它方法。 4)*** ERROR /"ALG_SINGULAR_JACOBIAN/"
2020-10-12 01:57
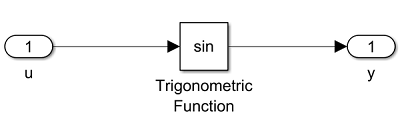
线性化)。简单来讲,在线性化的过程中,每个模块会先被线性化,算出各自的Jacobian矩阵。然后由Simulink Control Design工具箱把这些信息有效的整合在一起(这是一个非常复杂的过程),从而计算出整个模型的线性化结果。
2019-09-17 14:16
-牛顿-拉夫逊(拉弗森)方法 Python实现所有算法-雅可比方法(Jacobian) Python实现所有算法-矩阵的LU分解 Python实现所有算法-牛顿前向插值 兄弟们!今天的简单,我直接给大家
2022-07-13 10:40