提出了在采用最近邻聚类算法在线构造RBF(NN1)正向辨识器,并在线辨识被控对象的Jacobian阵的基础上,引入RBF(NN2)对PID控制器参数进行在线调整的算法。该算法可以实现PID控制参数的自动
2010-02-11 15:07
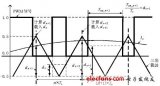
考虑数字控制采样计算延迟,建立了单相全桥DC-AC 电压型逆变电路在负载电压外环电感电流内环加给定电压前馈控制方法下的离散迭代模型. 通过分析相应的Jacobian 矩阵特征值轨迹,确
2012-02-06 14:53
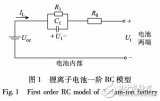
SOC估算。该算法首先用CM(1,1)替代EKF算法中Jacobian矩阵,对当前时刻电池系统状态预测,即实现系统状态先验估算;再通过观测值对系统状态进行更新和修正,获得后验估算值,实现对电池SOC的估算;最后在自主搭建的电池实验平台上对电池进行模拟工况放电实
2017-12-29 14:15
与外部环境,产生相应的虚拟力来“驱使”机器人实现期望的运动。这些虚拟力通过Jacobian 矩阵计算得到期望的关节力矩作为电机的控制输入。其需要计算腿部Jacobian矩阵,但是忽略了腿部的质量,在腿高速运动时误差巨大。又因为它使
2021-09-15 06:23
不能求解复数解,并且每次子返回一个解5.fsolve数值解方程(组)——使用最多的数值解法[x,fval,exitflag,output,jacobian]=fsolve(fun,x0,options
2012-03-08 16:31
issparse 若是稀疏矩阵则为真 isstruct 若是构架则为真 isstudent 若是Matlab学生版则为真 iztrans 符号计算Z反变换 J j , K k jacobian 符号计算中
2009-09-22 16:09