AUV半实物仿真系统是用于在实验室阶段研究AUV各种控制算法的半实物仿真系统。本文应用可信度研究中最基本的方法—相似理论法,对AUV半实物仿真系统的可信度进行了评估,通过计
2009-09-16 09:45
基于浮力调节系统的AUV深度控制研究_王雨
2017-01-13 21:36
基于Qt的AUV水面监控软件设计与开发_陈巩
2017-01-13 21:36
LDPC码在基于FH_FSK的AUV水声通信系统中的应用_陈允锋
2017-03-19 18:58
:AUV 要实现在未知环境中的自主导航,SLAM 理论与方法是最有潜力的途径之一。本文采用前视声纳扫描水下环境,采用数字图像处理的方法对环境的声纳图像进行特征提取,并使用
2009-12-16 12:32
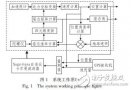
本文介绍了QNX 环境下集成开发环境——光子程序生成器(phAB)的功能与特性,阐述了QNX 光子微窗口系统的基本工作原理。基于phAB 设计并实现了一种AUV 动力设备测控平台,给出了
2009-06-10 16:07
AUV辅助的水下传感器网络时钟同步算法_常帅
2017-03-19 18:58
文中针对水下自主航行器提出了一种新型的基于捷联惯导(SINS)和GPS的组合导航系统设计方案。该方案以捷联惯导作为主系统,同时利用GPS重调捷联惯导系统,建立了该组合导航系统的
2013-08-20 11:33
针对同步定位与地图构建SLAM(Simultaneous Localization and Mapping)算法中,单个传感器提供的信息受到传感器本身特性和周围环境制约的局限性,提出了在仅声纳更新的SLAM算法同时,引入航向
2013-09-25 16:08
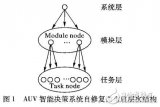
针对智能水下机器人( AUV)软件故障修复过程中存在的修复代价过高和系统环境只有部分可观察的问题,提出了一种基于微重启技术和部分客观马尔可夫决策( POMDP)模型的AUV软件故障修复方法。该方法
2018-01-05 16:59