今天,正运动小助手给大家分享一下EtherCAT运动控制卡开发教程之Qt,主要介绍一下SCARA机械手正反解的建立。
2022-06-02 15:20
通过分析造成SCARA机械手的误差因素原因,从而为了提高机械手的绝对定位精度,可以通过以下两大类方法来实现
2020-05-17 10:21
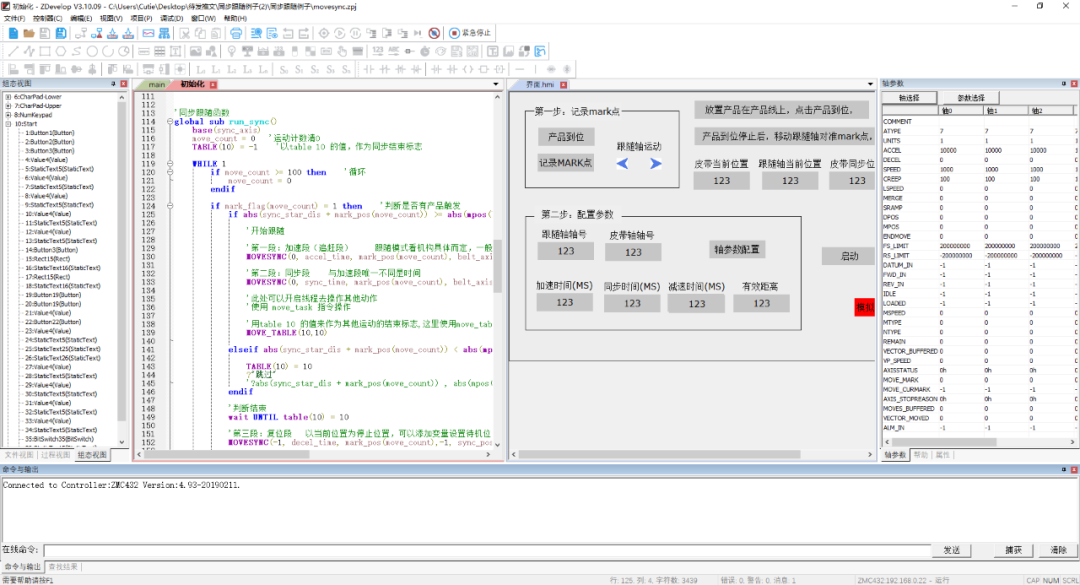
本文主要介绍如何使用MOVESYNC指令快速实现单轴/多轴同步跟随功能,适用于XYZ(R)、SCARA、DELTA等常见机械结构,在流水线点胶、流水线产品分拣、流水线产品搬运等场景中广泛应用。
2023-06-19 11:15
若以机械结构来看,工业机器人可区分为单轴机器人、座标机器人、水平多关节机器人( SCARA )、垂直多关节机器人以及并联式机器人( DELTA )等,以下依序就这五种类型来说明。
2018-11-11 10:14
若以机械结构来看,工业机器人可区分为单轴机器人、座标机器人、水平多关节机器人(SCARA)、垂直多关节机器人以及并联式机器人(DELTA)等,以下依序就这五种类型来说明。
2018-09-24 09:51

