2016-06-11-ubuntu-mate-16.04-Xenial-ros-kinetic-preview-bpi-m3-sd-emmc.img.zipBPI-M3 kernel
2016-06-14 11:21
大作业——ROS机器人定位导航仿真一、安装插件与相关配置1.下载源码包2.安装相应插件(1)ros-kinetic-driver-base(2
2021-12-17 06:15

usb数据线,杜邦线啥的了。2|0 环境:ubuntu16.04 + ros kinetic部分参考代码#include <ros.h>#include <ros/time.h>#include <tf/tf.h>//#include <tf/t
2021-12-16 16:51
FPGA模块和LVDS数字接口模块部署解决方案。ST Kinetic设计和实现了LVDS数据总线来将射频数据
2017-11-09 11:52
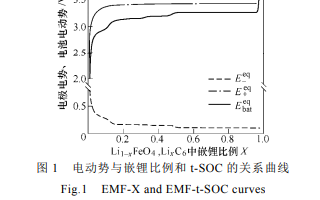
(thermodynamic-SOC,t-SOC)作为均衡判断依据,动力学荷电状态(kinetic-SOC, k-SOC)作为均衡控制依据的均衡控制策略。针对电池组在均衡前/后处于不同的状态提出电池组不均衡/均衡状态 SOC 估计算法。最终通过实验验证了电池组在不同状态下 SOC 估计的精度,并且根
2018-06-14 08:00

FPGA模块和LVDS数字接口模块部署解决方案。ST Kinetic设计和实现了LVDS数据总线来将射频数据实时、连续地从一个处理子系统传输到
2020-07-17 18:55
如何在ROS上使用其提供的serial包进行串口通信。我的环境介绍:PC:使用的是Ubuntu 16-04 ROS-Kinetic嵌入式端:STM32F071ROS机器人操作系统是用于创建机器人系统的功能强大的平台,其中包括开发项目所需的一切,从最简单的软件组件(称为“节点”)和数据交换协议到真.
2021-12-24 19:13
1.首先安装joy这个节点,通过sudo apt-get install ros-kinetic-joy2.配置JoyStickls /dev/input/你会看到by-id event1event12event15event18event3event6event9mouse0by-pathevent10eve
2021-08-30 06:24
u***数据线,杜邦线啥的了。2|0 环境:ubuntu16.04 + ros kinetic部分参考代码#include #include #include //#include
2022-02-15 07:28
如何在ROS上使用其提供的serial包进行串口通信。我的环境介绍:PC:使用的是Ubuntu 16-04 ROS-Kinetic嵌入式端:STM32F071ROS机器人操作系统是用于创建机器人系统的功能强大的平台,其中包括开发项目所需的一切,从最简单的软件组件(称为“节点”)和数据交换协议到真.
2022-02-21 07:27