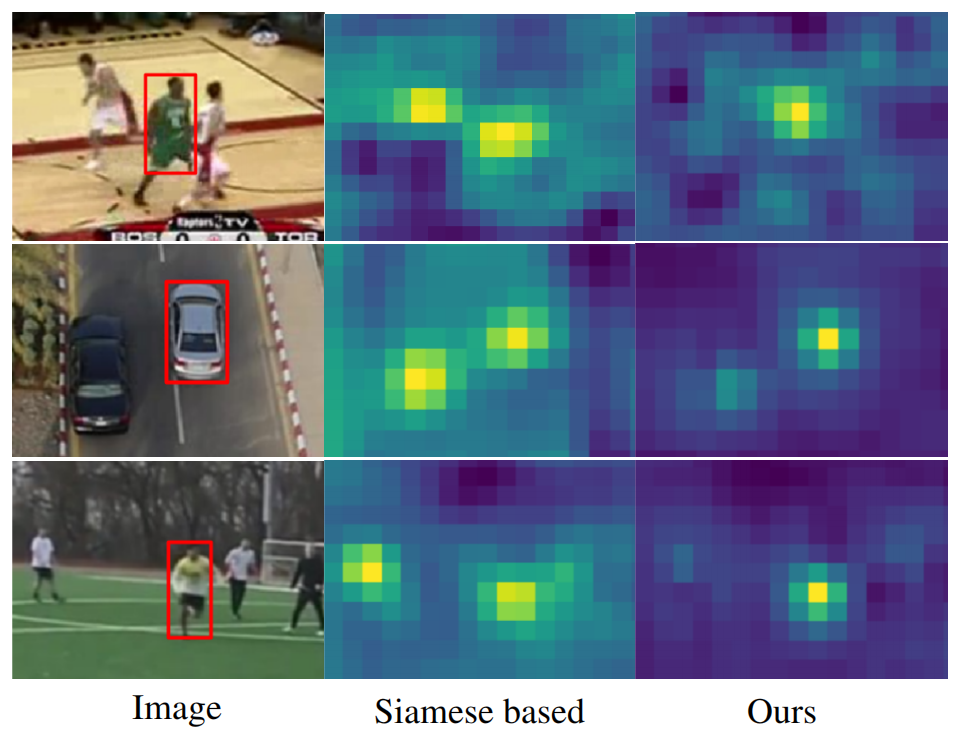
原文链接 论文地址:https://arxiv.org/pdf/1904.07220v1.pdf 代码: pytracking 中有 dimp 的代码 摘要 与大多数其他视觉问题相比,跟踪需要在推理阶段在线学习鲁棒的特定于目标的外观模型。为了能够进行端到端的培训,目标模型的在线学习因此需要自身嵌入到跟踪体系结构中。由于这些困难,流行的孪生网络仅预测了目标特征模板。但是,这种模型由于无法集成背景信息而具有有限的判别能力。 我们开发了一种端到端的跟踪体系结构,能够充分利用目标和背景外
2023-01-12 09:28
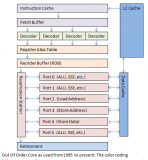
然而这样不能满足我们cpu的工程师,我们还有branch prediction,什么叫branch prediction呢?程序黎里面最耗时间的一个就是branch,就像c里面的if,你得到答案之前不知道是继续往下走还是进去if里面的括号。就像下单的小哥,那些犹豫
2019-04-22 10:44

要理解大语言模型(LLM),首先要理解它的本质,无论预训练、微调还是在推理阶段,核心都是next token prediction,也就是以自回归的方式从左到右逐步生成文本。
2023-09-19 16:25
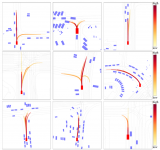
在自动驾驶领域,运动预测 (Motion Prediction) 是一个重要任务,它有助于场景理解和安全决策。该任务利用历史状态和道路地图来预测目标智能体的未来轨迹。其主要挑战来自未来行为的多模态性 (Multimodality) ,即智能体在相同环境和状态下可能展现出多种不同的行为模式。
2025-04-01 10:32

他们设计的神经网络架构包括一个新的“线性预测”(line prediction)层,它会教一个系统从连续拍摄的两张图像退回到跨越这两张输入图像捕获时间的运动模糊图像。他们的模型需要大量的训练数据
2018-12-29 09:11
bySelf-supervised Prediction”的论文中探讨了这个问题。此方法一般称为ICM方法。为了说明意外是如何引发好奇心的,这里再次以超市中寻找奶酪的比喻为例。
2018-10-26 10:02
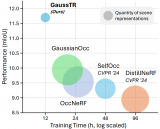
三维空间理解是推动自动驾驶、具身智能等领域中智能系统实现环境感知、交互的核心任务,其中3D语义占据预测 (Semantic Occupancy Prediction) 对三维场景进行精准的体素级建模。然而,当前主流方法严重依赖大规模标注数据,制约了模型的可扩展性和泛化能力。
2025-03-18 15:01
Mask R-CNN是承继于Faster R-CNN,Mask R-CNN只是在Faster R-CNN上面增加了一个Mask Prediction Branch(Mask预测分支),并且在ROI
2019-04-04 16:32