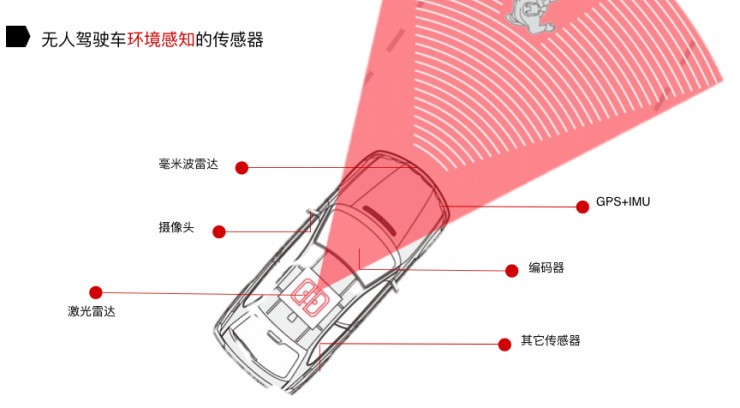
在无人驾驶汽车上,激光雷达和摄像头相对于是汽车的“眼睛”,他们俩各有不同的优缺点,激光雷达是获取高精度地图非常重要的传感器,那么无人驾驶汽车到底用激光雷达还是用
2016-12-07 10:42
和摄像头深度融合网络,以改进交通场景下的 3D 语义分割。单个传感器主干提取相机图像和激光雷达点云的特征图。
2022-10-09 15:24
只要数据够好,就可以用那些为摄像头开发的算法,来做深度学习。
2018-10-01 16:33
摘 要 :目前在交通监测领域中毫米波雷达和摄像头已经被大量使用,传感器融合可以弥补单一传感器的劣势,做到优势互补,两者融合需要标定出传感器间的空间转换关系。对于毫米波雷达
2022-10-27 14:15
经过拆解可以看出PIN型固态激光雷达除镜头外都有标准的量产元件可以选择,门槛很低,成本也不高,未来可以取代传统的低像素摄像头。但与摄像头比,激光雷达可以全天候全天时工作
2018-05-24 03:12

车载摄像头的畸变矩阵描述了摄像头镜头造成的畸变,主要包括径向畸变和切向畸变等参数。畸变矩阵的作用是对图像进行畸变校正,使其更符合几何规律,提高图像的准确性和质量。
2024-03-21 11:11

摘要这款DIY的PiLiDAR扫描仪项目利用树莓派进行激光雷达测绘。激光雷达通过发射激光来扫描周围环境,从而创建三维模型。该项目需要树莓派4、摄像头、电机以及
2025-06-01 08:33 上海晶珩电子科技有限公司 企业号

所谓雷达,就是用电磁波探测目标的电子设备。激光雷达(LightDetectionAndRanging,简称"LiDAR"),顾名思义就是以激光来探测目标的雷
2023-12-18 17:18
在救援方面,激光雷达也具有不受光线影响的优势,可以弥补摄像头在黑暗光线下无法清晰定位和描述的弱点,在供电中断光线昏暗的情况下,我们依然可以利用手持激光雷达设备实时进行移动式测量,开展救援工作。
2021-08-10 17:18
载波的雷达。激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。 激光雷达利用激光光波来完成上
2018-02-20 09:48