
在这些情况下, 传感器自带的噪声、无纹理的黑暗区域和反光等不利因素都违反了基于监督和自监督学习方法的训练假设。自监督方法无法建立学习深度所需的像素的对应关系,而监督方法则可能从传感器真值中(如上图中的 LiDAR 与 nuScenes 的数据样本)中学习到数据瑕疵。
2023-09-04 16:14

TUM数据集上相机跟踪结果,评价指标是ATE RMSE [ m ] (↓),表示相关文献未提及这个数据。
2024-01-12 11:24
来自马克斯·普朗克量子光学研究所(MPQ)、慕尼黑科技大学(TUM)和路德维希-马克西米利安-慕尼黑大学(LMU或慕尼黑大学)的激光物理学家们首次得到了850 zs(1zs=10-21s)的精确测量结果。
2017-01-10 11:26
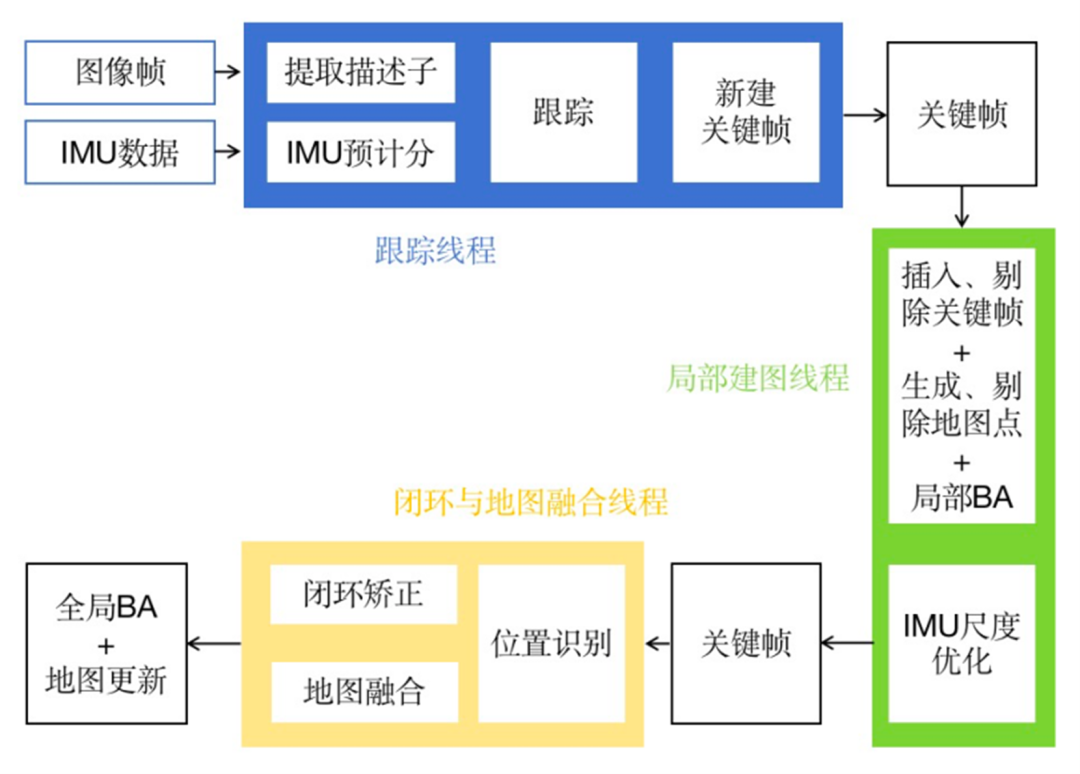
的提取算法,后端是局部地图的维护、闭环矫正与全局地图的更新。在 TUM 数据集测试中,其最高精度可达 1cm。我司基于该框架研发算法,实现双目视觉与 IMU 数据的融合,精准计算位移距离并给出可靠的实时
2023-09-18 10:12