最近一周多的时间开始学习并自己动手制作了一个循迹小车,主要运用的就是tb6612芯片以及红外避障模块,这篇博客主要就是总结一下在制作小车过程中学习到的知识以及问题。 一、有关IO输出输入的总结
2021-02-14 06:33

该模块相对于传统的L298N效率上提高很多,体积上也大幅度减少,在额定范围内,芯片基本不发热,当然也就显得更加娇贵,所以我们建议有一定动手能力的朋友使用,接线的时候务必细心细心再细心,注意正负极性。
2025-03-29 17:21

通过合理的硬件设计和详细的视频笔记介绍,硬件使用STM32F103主控资料多方便学习,通过3万字笔记、12多个小时视频、20多章节代码手把手教会你如何开发和调试。
2024-08-12 18:29

一辆'自动化'小车,要能够像人一样,有观察事物的眼睛,有处理事情的大脑,有可以跑动的腿,这里: 输入信号模块就像人类的眼睛,可以讲一些外界信息测量并送至'大脑',比如超声波把距离信息发送给单 片机。
2024-08-12 18:27
JetBot 小车使用的电机驱动模块上用了 PCA9685 扩展 I/O ,一边与主控通过 I2C 总线通信,另一边连接 TB6612 马达驱动芯片。
2020-09-26 09:49
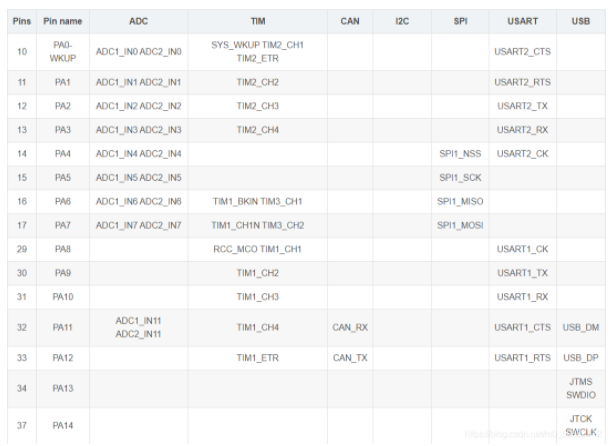
主控芯片用的是100脚的STM32F103VET6,陀螺仪用的是MPU6050,电机驱动用的是TB6612,蓝牙是汇承的HC05邮票孔封装的
2022-07-06 17:01

基于STM32两轮自平衡小车系统设计与控制 含源码、原理图及PCB文件.主控芯片用的是100脚的STM32F103VET6,陀螺仪用的是MPU6050,电机驱动用的是TB6612,蓝牙是汇承的HC05邮票孔封装的,WIFI用的是济南有人科技的USR-WIFI232-S
2022-04-30 23:20
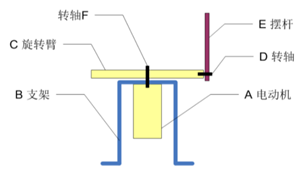
硬件依托于ART-PI开发平台,主控芯片采用STM32H750高性能单片机,同时采用TB6612芯片作为旋转倒立摆的核心动力驱动,采用霍尔传感器作为速度采集,采用高精度电位器作为摆臂角度采集传感器,采用OLED屏幕来进行参数的显示,与实时调整。
2021-02-25 16:44

电机采用的是平衡小车之家的MG310(GMR编码器)电机。底板上有两个TB6612芯片,可以驱动四个电机,除了做平衡小车之外,也可以用来作为四驱车的底板,非常nice,同时支持两种控制方式,推荐通过红外遥控进行控制,实现起来非常简单,红外遥控器也非常便宜。
2023-11-30 09:31

蓝牙模块、OLED屏幕、TB6612和红外循迹模块组成,电源采用可充电锂电池供电,建议不要使用 1.5V 干电池供电。 图1 CW32小车 二、硬件部分 2.1主控板 小车主控板由小蓝板和控制底板组成,小蓝板通过排母与控制底板相连,控制底板上还预留了按键等功能。主控板的原理图分别如下: 图
2024-05-31 17:33