
本来继上集(【芒果派MangoPi MQ Quad】利用MangoPi MQ Quad部署一个网络摄像头-电子发烧友网 (elecfans.com))后,继续写公网视频传输,后来一直没找到合适的公网
2023-07-22 09:10

要为 Versal 的多个 Quad 创建收发器设置,建议从 Transceiver Bridge IP 开始,在其中选择所需的设置,然后交由 Vivado 通过块自动化设置来为此设置创建必要的 Quad。
2023-06-09 10:55

1、编译环境 操作系统直接是官方的Debian。 root@orangepizero2:~# uname -aLinux orangepizero2 5.16.17-sun50iw9 #3.0.8 SMP Sat Apr 15 13:13:46 CST 2023 aarch64 GNU/Linuxroot@orangepizero2:~# gcc也自带了,手痒升级了下。 root@orangepizero2:~# gcc -vUsing built-in specs.COLLECT_GCC=gccCOLLECT_LTO_WRAPPER=/usr/lib/gcc/aarch64-linux-gnu/10/lto-wrapperTarget: aarch64-linux-gnuConfigured with: ../src/configure -v --with-pkgversion='Debian 10.2.1-6' --with-bugurl=file:///usr/share/doc/gcc-10/README.Bugs --enable-languages=c,ada,c++,go,d,fortran,objc,obj-c++,m2 --prefix
2023-07-22 09:15

本博客提供了基于2023.2 Vivado的参考工程,展示如何使用Microblaze 地执行(XIP)程序,并提供一个简单的bootloader。
2024-10-29 14:23
Quad-rotor飞行器是固联的刚性十字交叉结构的小型无人飞行器,具有固定倾角,由四个独立电机驱动螺旋桨组成。它通过平衡四个螺旋桨产生的力来改变升力和飞行姿态,以实现稳定盘旋和精确飞行。
2020-05-03 10:49
Freescale I.MX6Quad,ARM Cortex A9四核,1G主频
2019-11-18 17:12
处理器:NXP/Freescalse I.MX6 Quad CPU ARM Cortex A9, each @ 1GHz
2019-10-15 16:29

Freescale I.MX6Quad,ARM Cortex A9四核,1G主频
2019-11-19 11:41
)440 FPGA的Quad VU440 Prodigy Logic Module。Quad VU440 Prodigy LM是由单板组成的全用途FPGA原型系统,同时Quad VU440 LM的大量的物理互连线以及
2018-06-29 08:09
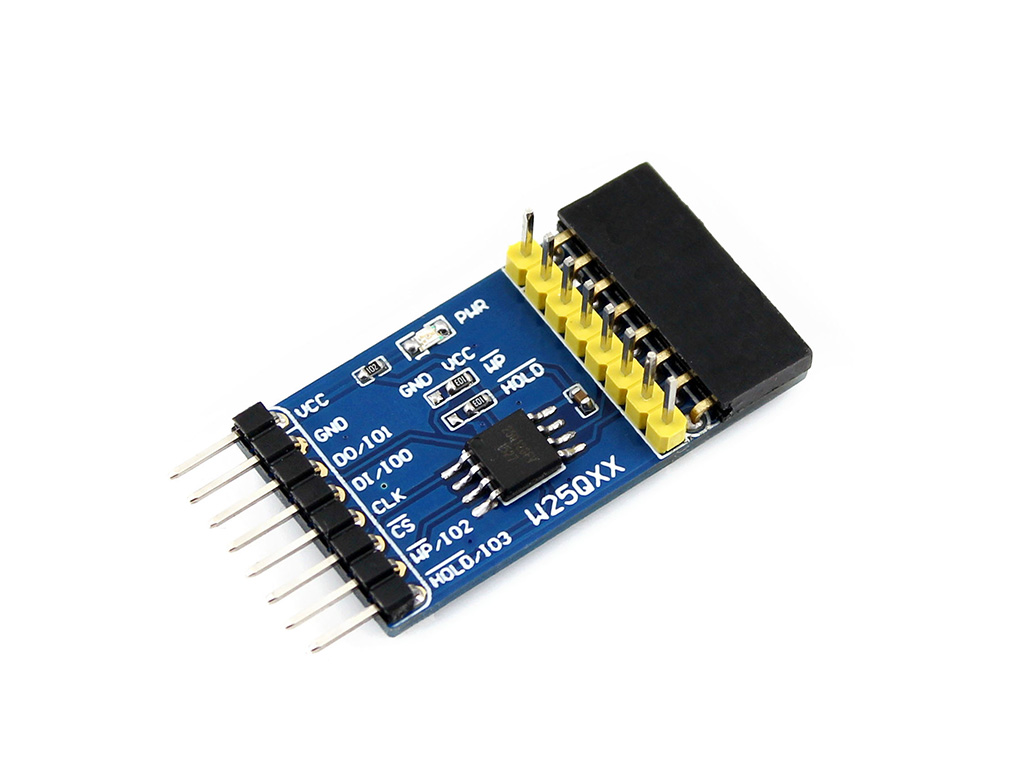
W25Q128JV DataFlash 模块 Quad-SPI接口 容量: 128M-bit/16M-byte 型号 W25QXX DataFlash Board
2019-12-30 10:00