机器人在执行飞行焊接程序时,通过KUKA 用户程序调用焊道的程序号,给PFO软件,然后PFO软件将此程序号里激活的所有焊道及其数据都通过CAN总线发送给PFO焊头,焊头对此程序号内所有焊道逐一进行焊接。
2020-05-11 10:29
机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
2020-06-30 17:11
控制单元各板卡通过HAAS-Bus总线与CPX通讯,CPX与外部进行交互。
2023-04-06 10:31
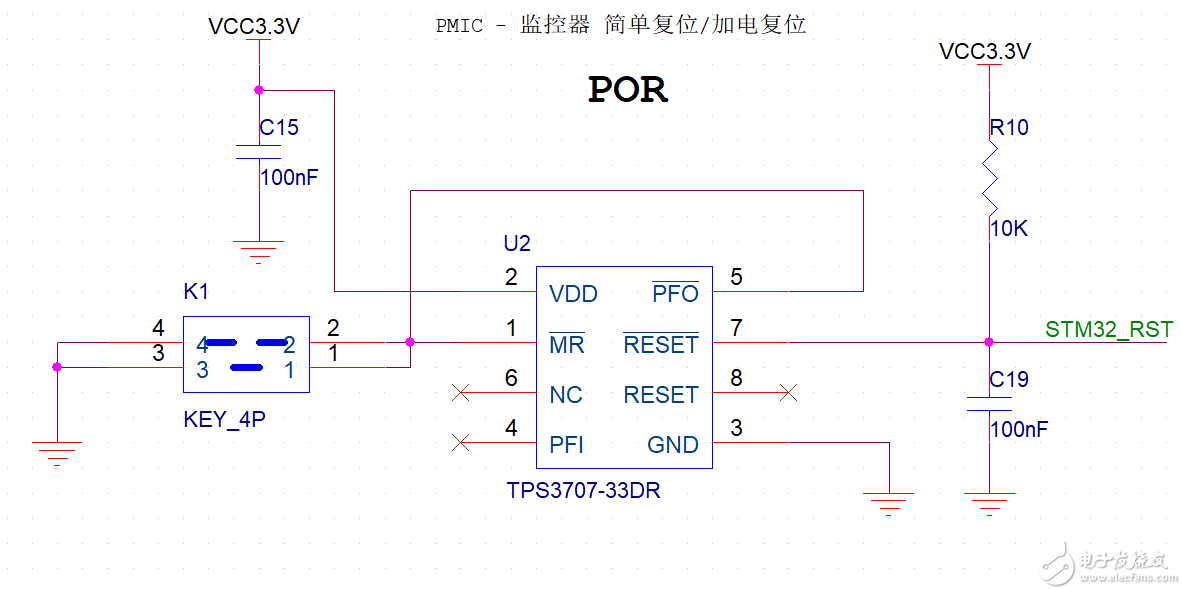
如上图,上电后7号引脚持续为低电平(复位状态),将5号脚跳开后恢复正常,那这个5号脚PFO/应该怎么接呢?
2019-03-28 10:22

IFMIT_KL1_SPUELEN AND ((NOT $OUT[O_R_PFO] AND NOT KL1_stat) OR (KL1_stat AND NOT$IN[I_Sp_Ruh_KL1]) OR ($EXT==FALSE)) AND KL1_SPUELEN_AKTIV THEN
2020-06-12 14:52

。图中,Vcc、Vout分别为电源输入、输出,Vbatt 为电池输入;LOW LINE为电源低输出,SWT、WDI、WDO、WDP分别为看门狗定时设置、触发输入、超时输出和超时脉冲;PFI和PFO分别为电源故障输入和输出,PFI低于1.25V时 PFO变低产生告警
2020-11-01 10:32
在半导体芯片的物理和故障分析过程中(即验证实际沉积的层,与导致电路故障的原因),为了评估复杂的半导体结构,拥有适当的处理工具至关重要。为制造的每件产品开发了去加工技术,涉及多步pfo程序,揭示芯片
2022-06-20 16:38
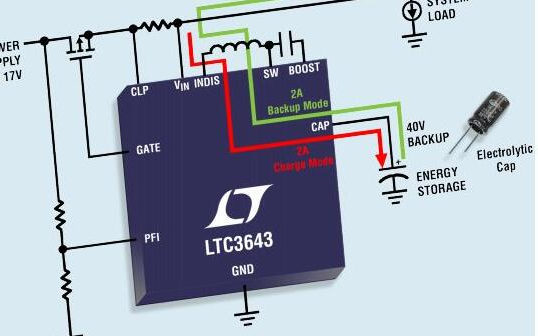
IC 电流减小至某一点,在该点上 RA 两端的电压下降到低于 Q2 栅极门限电平且 Q2 关断,因而不再影响备份电源转换器的功能。另外,PFO 引脚将 R3A 接地,从而把 PFI 引脚电源故障电压电平复位至最小值 3V,以确保转换器在输入电压电源断接时保持正常运行。
2018-04-11 07:11
0,CDay 0,CHour 0,CMin 0,CSec 0} 用于PFO激光飞行焊数据的报存: MyDate = $DATE PFOL
2022-07-15 10:52