3G3IV-PFO-OC/1
2024-06-21 01:50
机器人在执行飞行焊接程序时,通过KUKA 用户程序调用焊道的程序号,给PFO软件,然后PFO软件将此程序号里激活的所有焊道及其数据都通过CAN总线发送给PFO焊头,焊头对此程序号内所有焊道逐一进行焊接。
2020-05-11 10:29
机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
2020-06-30 17:11
控制单元各板卡通过HAAS-Bus总线与CPX通讯,CPX与外部进行交互。
2023-04-06 10:31
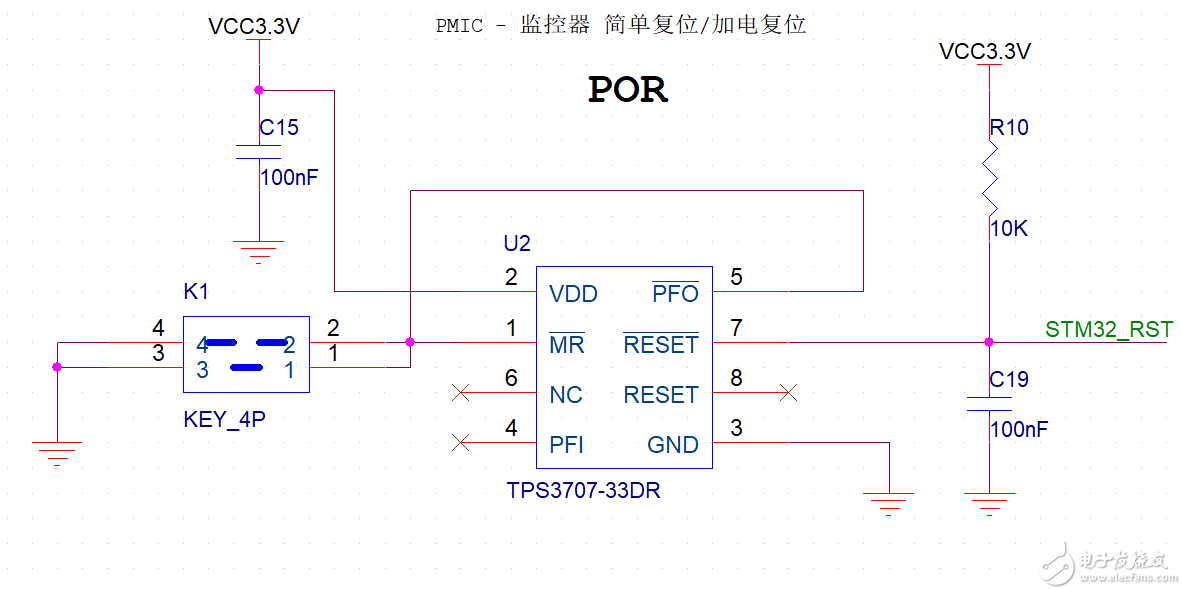
如上图,上电后7号引脚持续为低电平(复位状态),将5号脚跳开后恢复正常,那这个5号脚PFO/应该怎么接呢?
2019-03-28 10:22

IFMIT_KL1_SPUELEN AND ((NOT $OUT[O_R_PFO] AND NOT KL1_stat) OR (KL1_stat AND NOT$IN[I_Sp_Ruh_KL1]) OR ($EXT==FALSE)) AND KL1_SPUELEN_AKTIV THEN
2020-06-12 14:52
的数据备份。 电路功能 在正常操作中,当 P 沟道 MOSFET Q1 导通时,PFO 标记为低电平且电解电容器阵列 CSTORAGE 被充电至 40V。当输入电压中断时,LTC3643 把 Q1
2018-10-10 15:26
VCC。2、VCC 接稳压器输出端。3、GND 接地。4、PF1 稳压器输入端。5、 PFO PF1低于1.25V时,输出低电平为微机提供中断处理信号。6、WDI 接微机I/O脚输出信号。7、RESET接微机复位脚,当微机软件1.6秒以上还未工作也会复位。8、VBATT接后备电源。
2021-05-13 07:11

。图中,Vcc、Vout分别为电源输入、输出,Vbatt 为电池输入;LOW LINE为电源低输出,SWT、WDI、WDO、WDP分别为看门狗定时设置、触发输入、超时输出和超时脉冲;PFI和PFO分别为电源故障输入和输出,PFI低于1.25V时 PFO变低产生告警
2020-11-01 10:32