/1任务void motor1_task(void *pdata){ OS_CPU_SR cpu_sr=0; while(1){motor1=0;delay_us(10
2019-07-12 04:36
的:Motor1=Thr - out_roll - out_pitch - out_yaw;Motor2=Thr - out_roll + out_pitch + out_yaw;Motor3=Thr
2018-04-09 11:46
=20,所以我想两种写法的输出频率应该一样才对,怎么会相差这么多。14.3kHz才是我需要的频率,请高手帮助,谢谢了。晶振频率11.0592MHz.1 #include 23 ***it motor1
2012-09-28 10:04
*******************************************/#include ***it motor1=P2^0;***it motor2=P2^1;***it
2016-04-30 15:49
***it motor1= P0^0;45 unsigned int count,b;6 main()7 {8b=20;9TMOD = 0x01;10TH0= 100;11TL0= 100;12TR0= 1
2012-09-28 08:54
马达 桥式方向控制 程序 /* 桥式方向控制实验(ch14-4-3.c) */ #include reg51.h sbit motor1 = P1^0; // 声明直流马达位置 sbit
2017-09-06 14:51
//uchar 的范围是0~255#defineuintunsigned int//uint 无符号整型 范围是0~65535***it MOTOR1 = P1^5;//电机控制端口1***it
2016-05-13 11:43
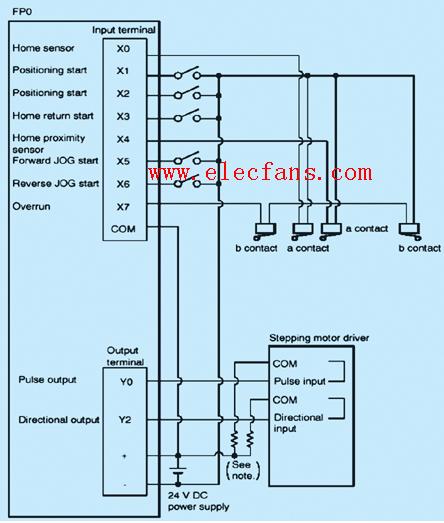
plc步进电机原理图 PLC选用日本松下FP0 PLC,共8点输入(X0~X7),8点输出(Y0~Y7),主要控制主电机Motor1
2008-05-22 11:49
三个步进电机同步运行 直接可用 单片机源程序如下: #include #define motor1 1#define motor2 2#define motor3 3
2018-07-06 09:08
据美国媒体motor1 7月5日消息,德国船用电动舷外机制造商Torqeedo将利用宝马i3锂离子电池生产电动机。
2017-07-07 11:32