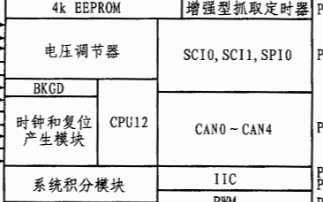
介绍了摩托罗拉16位单片机MC9S12DP256的结构、特点及其区别于其它单片机的优势。通过MC0S12DP256在汽车电子门控汽车电子系统的应用实例,简单介绍了MC9S12DP256单片机在汽车电子领域的应用方法。
2020-04-06 10:37

CCP 协议是一种CAN 总线标定匹配协议。本文简单介绍该协议的基本原理,以及一种基于该协议的汽车ECU 标定系统的实现方法。最后,结合MC9S12DP256 芯片以及μC/OS-II操作系统,详细讨论了此标定系统的CCP 软件实现方法。
2021-04-12 09:57

简介: MC9S12G系列是经过优化的汽车级16位微控制器产品线,具有低成本、高性能、引脚数量少的显著特点。MC9S12G系列适合需要CAN或LIN/SAE J2602通信的一般汽车应用。 基本特性
2018-06-27 09:13
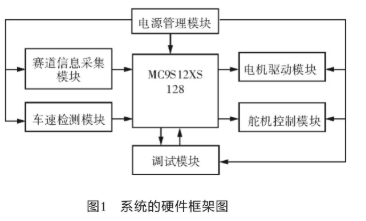
以飞思卡尔16位单片机MC9S12XS128为核心控制器,以二轮玩具车为控制对象,使用ENC-03RC陀螺仪传感器与MMA7361加速度传感器,通过使用匹配滤波算法实现二轮玩具车模倾斜角度的测量。在此基础上,将二轮玩具车直立运动线性分解,设计出直立速度控制器。实现了二轮车直立运行。
2018-03-20 10:58
以及车辆工程等多个学科交叉的科技创意性比赛。本文以此为背景,基于MC9S12xS128单片机设计了一种智能车系统。
2020-04-06 11:04
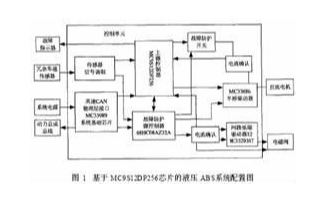
汽车制动性能的好坏,主要从以下3方面进行评价: 1)制动效能,即制动距离与制动减速度; 2)制动效能的恒定性,即抗热或水衰退性能; 3)制动时汽车的方向稳定性,即制动时汽车不发生跑偏、侧滑以及失去转向能力的性能。
2021-04-12 10:39
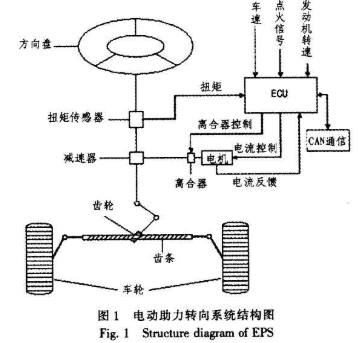
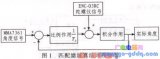
电动助力转向系统结构如图1所示,主要由方向盘、扭矩传感器、电子控制单元(ECU)、电机、电磁离合器、减速机构、齿轮齿条转向器组成。在汽车发动机点火后,转动方向盘时,由安装在转向轴上的扭矩传感器测得转向力矩,并送给ECU,ECU根据转矩和车速,通过预先设置好的助力特性曲线和控制策略计算出一个电机所需的最佳电流,从而控制电机输出力矩和转动方向,然后经过减速机构施加到转向机构,最终得到一个与行驶工况相适应的转向作用力,辅助驾驶员转向。
2020-04-17 17:44
智能车系统以飞思卡尔公司的MC68S912DP256为核心,由电源模块、传感器模块、直流电机驱动模块、转向电机控制模块、控制参数选择模块、单片机模块等组成,如图1所示。智能车系统工作电压由+1.6V
2021-04-02 13:54

本设计要求对某火炮的水平和高低角进行控制,达到快速位置伺服系统的要求。而这个火炮角度控制系统首先要求有快速性,它的反应时间大于或等于12°/s;角度转动控制精度小于或等于1’,水平角转动范围从一120°~+120°,高低角转动范围从0°~+85°;最后系统要有
2016-05-27 14:27
所谓完全加密,就是将芯片彻底的保护起来,屏蔽对芯片的所有读操作。在MC9S12DP256单片机中,加密是通过对某一Flash单元($FF0F)编程来实现的。加密后的芯片,BDM编程器对Flash的读操作就被禁止了。
2019-10-18 16:53