或者可以通过 WorkVisual 更改密码。如果在机器人控制系统上安装了 KUKA.NonAdmin,则只能通过 WorkVisual 更改该密码。
2023-12-12 17:11
KUKA机器人固定焊钳的铣削控制
2023-04-13 11:36

一般的KUKA程序: 1 PTP P0 2 SPLINE 3 SPL P1 4 SPL P2 5 SPL P3 6 SPL P4 7 SCIRC P5, P6 8 SPL
2023-07-07 11:25
大众版KUKA程序使用的程序包括SRC和Dat文件
2023-06-08 15:47
结构类型 FRAME 的变量指明基于 WORLD 坐标系的 ROBROOT 坐标系位置。
2022-10-26 11:16

“概述”区域显示所有现有的TOOLS、BASES和外部运动学,每个都在一个单独的选项卡中。
2024-01-15 10:44
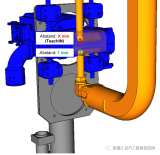
:(F331) 吹扫是通过命令“关闭钳子”开始的。 变量3:(F332) 吹扫是通过命令“打开钳子”开始的。 配置是在宏57中完成的。 示例配置在文档中: “KS_Part_2_2_01_KS26_ROB-KUKA_project-specific_specifications” 2.铣削过程中调整行程 在开始
2023-05-31 09:13
SUBMIT 解释器与机器人解释器和 I/O 管理器共享系统功率,其中,机器人解释器和 I/O 管理器具有更高的优先级。因此,SUBMIT 解释器不会定期在机器人控制系统的 12 ms 插值周期内连续运行。
2023-03-08 11:22
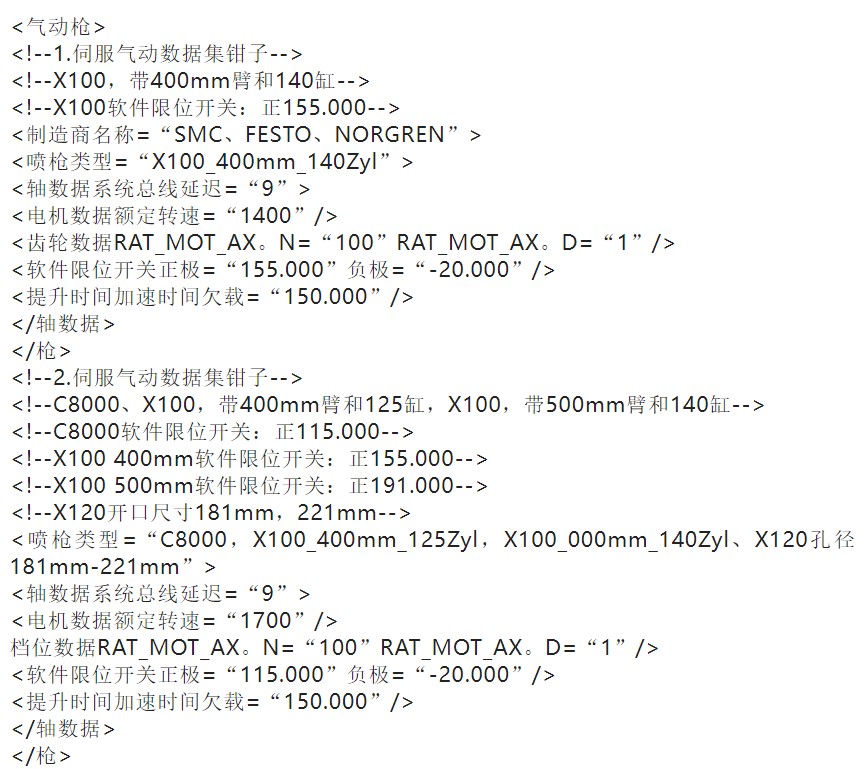
KUKA机器人气伺服焊钳虚拟外部轴的配置文件
2022-11-10 16:25
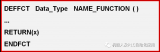
DEFFCT ...ENDFCT:定义函数 DEFFCT 数据类型 名称( ) RETURN 函数值 ENDFCT 句法: 元素 说明 数据类型 功能的数据类型 名称 功能的名称 变量 如果将一个值传递到功能中:要将该值传递到其中的变量名称 IN | OUT 如果将一个值传递到功能中:传递的种类 函数值 反馈值 函数是指返回参数回主函数的子程序。 程序的返回类型也是一种数据类型。 传递的参数必须在ENDFCT之前,用RETURN(x)返回。 函数实例 RETURN:跳回到调用的程序中 子程序 如果在子程序中满足了特定的
2023-05-25 14:18