K64子系列参考手册
2021-11-16 17:26
基于K64 KSDK的fatFs+SDHC例程分享
2015-12-07 18:26
K64 学习历程,有需要的看一看,不收积分。
2015-11-20 16:54
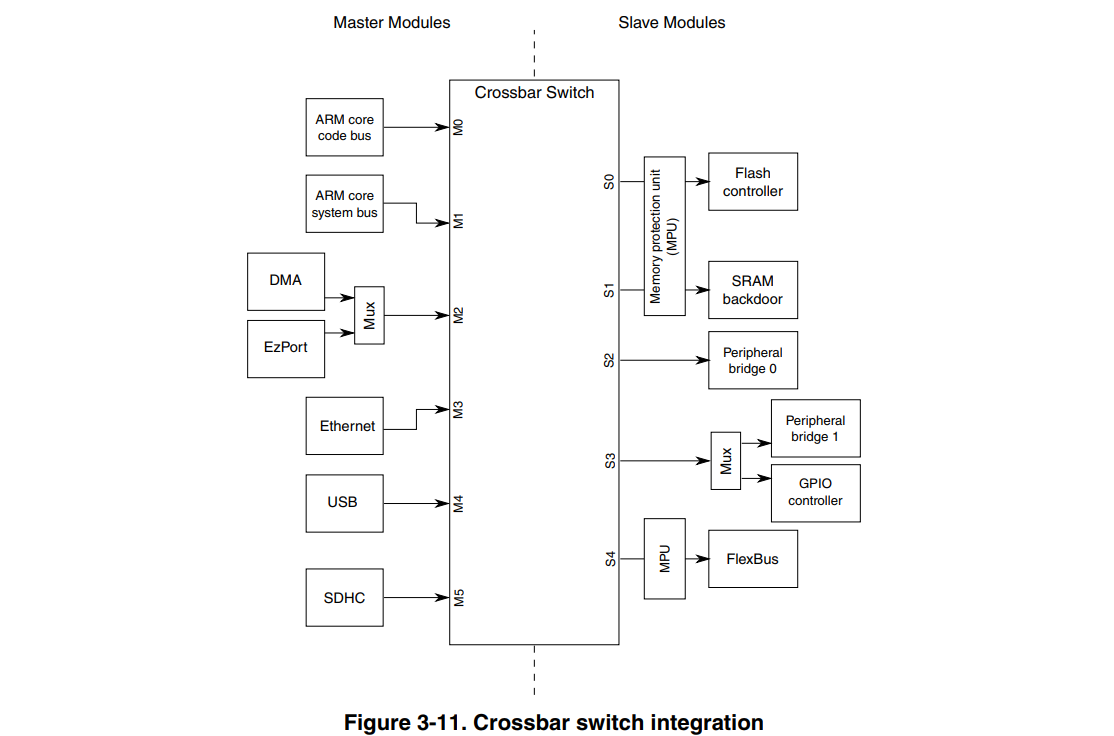
本文档的主要内容详细介绍的是K64系列单片机的参考手册详细说明 本文描述了微控制器的特点、结构和编程模型。
2020-03-02 08:00
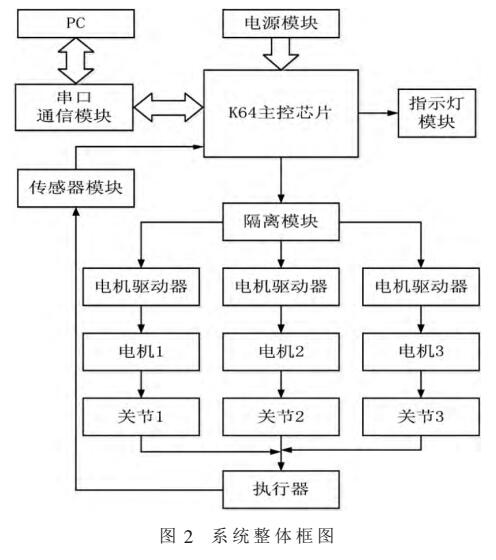
机器人范畴的一部分。 为了解放人类生产力,用机器取代人类做一些重复且危险的工作已成为必然。在调研了目前市面上机械臂的发展情况下,结合实际设计了一套基于K64的三自由度机械臂控制系统。该机械臂在平面上具有良好的顺从性
2018-01-25 14:58
2015-04-18 16:30
基于K64 KSDK的fatFs+SDHC例程分享
2015-12-07 18:27
TWR-K64F120M,Kinetis K64 MCU模块。 TWR-K64F120M是Kinetis K24,K63
2019-08-12 08:49
1. MCU资源使用情况在开发板申请阶段就已经对需要实现的大致功能有了明确的说明,所以MCU需要哪些硬件资源也就很明确了。下图是已经使用到的MCU硬件资源框图:通过图中可以看到主要使用到是MCU资源主要有PWM、捕获和UART。2. 软件流程图整个软件以FreeRTOS为基础,总共建立了3个Task,分别是:vUartTask,vMotorTask,hello_task。vUartTask主要用于UART3相关的串口通信协议处理,任务间隔执行时间为5ms。vMotorTask用于电机运行状态的控制,任务间隔执行时间100ms。hello_task用于测试,现在只用到了一个LED闪烁,间隔时间1s。下图是软件整体的运行流程图,其中还使用到了FTM0_IRQHandler和Uart3_IRQHandler。FTM0_IRQHandler用于在PTC3捕获到上升沿和下降沿时读取FTM0计数器的计数值,两次中断捕获到的计数值的差值再结合计数器的计数频率就可以计算得到脉冲的时间。Uart3_IRQHandler用于接收蓝牙模块发送给MCU的UART数据,将接收到的数据存储到接收数据队列里面。Uart Task流程图:3. 蓝牙协议这次DIY中需要蓝牙来传输的数据有:l 手机APP发送给MCU的数据主要有:小车的运动方向前,后,左,右,停以及小车PWM占空比l MCU发送给手机的数据:测量到的障碍物距离小车采用的通信协议如下,目前小车的方向控制、测距功能均已实现:方向控制APP发送给小车,小车不返回数据 头命令占空比 sum停止0xAA0x000x00sum 前进0xAA0x010xXX sum 后退0xAA0x020xXX sum 左0xAA 0x030xXX sum 右0xAA 0x040x00sum APP每间隔300ms查询一次前方障碍物距离头命令预留sum查询命令 0xAA0x200x000xCA小车返回 0x55 0x00 0xXX sum
2016-07-14 17:10

HT6221/HT6222能编码16位地址码和8位数据码, HT6221/HT6222包含32键(K1 K32) 和 64 键(K1
2019-04-22 08:00