发文章
发资料
发帖
提问
发视频
0
搜索热词
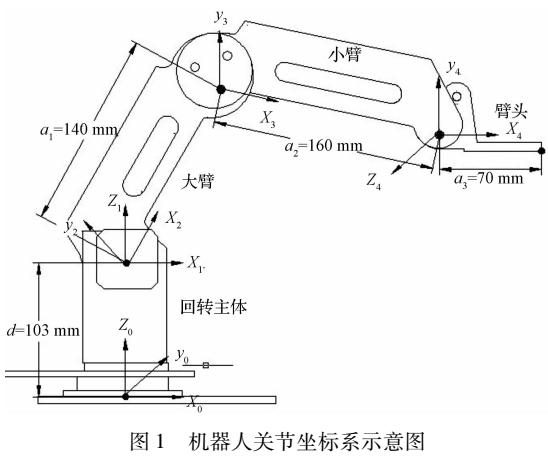
为了获得Dobot机器人的正逆解计算公式、避免解被丢失的可能性和保证角的精度,根据该型机器人的结构特点,运用D-H法建立了机器人的坐标系和运动学方程,进行了正逆运动学的分析,将双变量反正切函数应用到
2018-03-14 15:00
CONVEYOR BELT KIT FOR DOBOT MAGI
2024-03-14 22:29
SLIDING RAIL KIT FOR DOBOT MAGIC