
1、回顾、原理前面文章利用,ARR,CCRx制作了呼吸灯。void motor_task (void * arg) { osStatus_t status; bsp_InitPWM
2021-12-22 19:40
脉冲宽度调制模式可以产生一个由TIMX_ARR寄存器确定频率、由TIMX_CCRx寄存器确定占空比的信号。
2020-01-02 08:00
注意:本人水平原因,可能会犯些错误!!!PWM原理:CCRX:比较值(X表示通道) ARR:装载值CubeMX配置:注意分频系数,和自动装载值
2021-12-29 18:48
一、基本概念1.yDMA一般为多通道,每个通道之间是存在优先级的(通过寄存器CCRx_PL设置);当优先级一致,且多个通道同时来时,优先处理编号更低的通道。
2021-10-25 12:06
STM32-定时器输入捕获实验(捕获PWM方波的频率和占空比)一、输入捕获模式在输入捕获模式下,当检测到ICx信号上相应的边沿后,计数器的当前值被锁存到捕获/比较寄存器(TIMx_CCRx)中。当
2021-12-14 18:55
波的方式触发ADC;PWM模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。下面了解一下ARR和CCRx的寄存器和相应的固件库函数。想要了解更多需要查阅STM32参考手册.TIM2定时器主要代码:void TIM2_In
2021-11-30 10:36
的倒数。N是PWM波一个周期的计数脉冲个数,也就是STM32的ARR-1的值。n是PWM波一个周期中高电平的计数脉冲个数,也就是STM32的CCRx的值。2、PWM DAC硬件二阶RC滤波截止频率计算公式为:f=1/2πRC...
2021-12-16 16:56
PWM控制舵机角度(keilc本文主要关于参数配置:arr,psc,ccrx(setcompare函数参数)TIM相关配置简单提一嘴:(涉及到寄存器,但仅有库函数知识不妨碍实践)配置时最关键的两个
2021-11-26 12:06
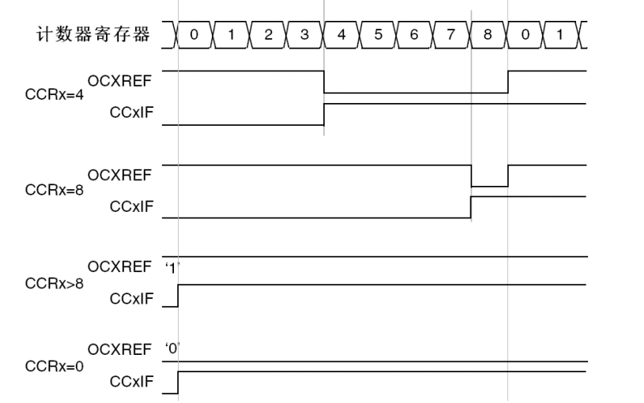
脉冲宽度调制PWM,实现对电机速度的控制。1、PWM输出原理假定定时器工作在向上计数 PWM模式,CNT为当前计数值,CCRx为捕获/比较寄存器CCRx的值(预装载值)。当 CNT=CCRx
2021-07-05 06:09
脉冲宽度调制PWM,实现对电机速度的控制。1、PWM输出原理假定定时器工作在向上计数 PWM模式,CNT为当前计数值,CCRx为捕获/比较寄存器CCRx的值(预装载值)。当 CNT=CCRx
2021-09-06 07:05