发文章
发资料
发帖
提问
发视频
0
搜索热词
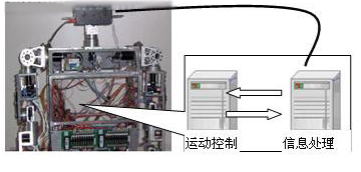
与控制系统进行通讯。日本仿人机器人ASIMO的运动控制系统采用集中式控制方式,视觉系统通过网络与运动控制系统通讯。一台计算机难以满足视觉跟踪的实时性要求,为了实现实时跟踪,本文提出并实现了一种基于MemoLink通讯的双计算机的视觉跟踪系统。该系统通讯可靠、体积小,便于将两台计算机安置于仿人机器人的胸腔内。
2021-04-13 14:18