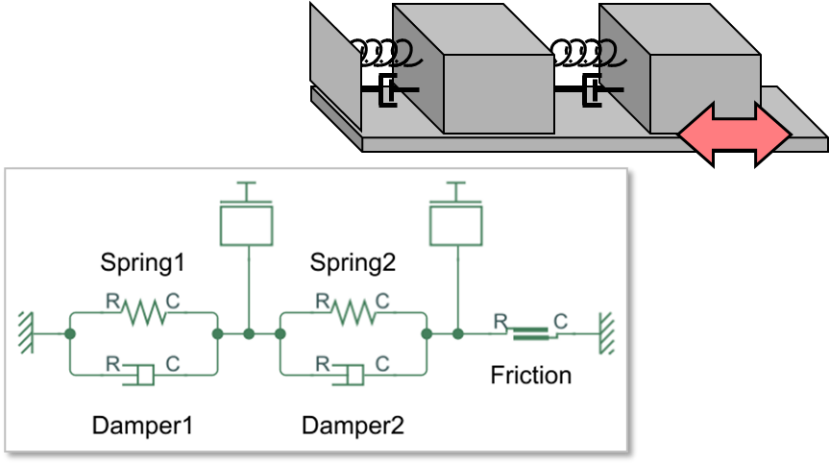
前面提过 Simscape 平台除了其上的几个专业工具箱之外,作为平台的角色它自己也有一个 Foundation 元器件库。这里包括 10 种不同的物理域,包括机械(平动、转动), 电, 流体(气、绝热流体、热流体、两相流)、热、磁。
2024-09-05 09:21
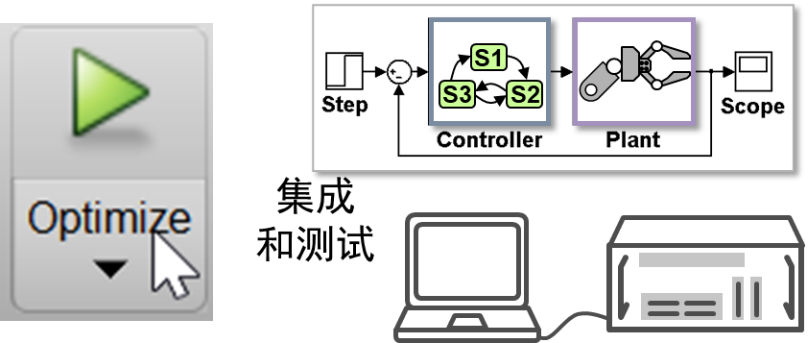
对于复杂系统来说,搭建闭环系统模型是控制开发过程中不可缺少的一环,它不仅能帮助我们验证控制算法还能进行系统级性能分析与优化。模型贯穿桌面仿真到实时仿真,帮助我们通过各种手段的仿真测试尽早的发现集成问题。
2024-09-05 10:12
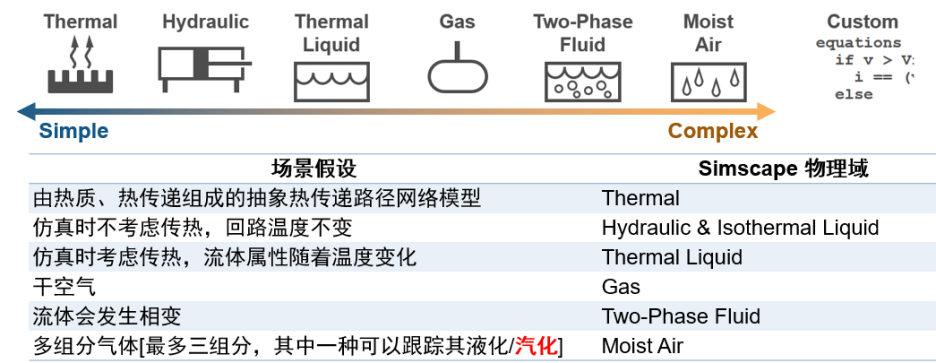
我在之前的总述部分给出过下面这张示意图,描述了 Simscape 的流体系统建模所适用的场景。现在再把它放在这里,稍微修改了描述,希望能更清楚的表达各个子库所适用的场景。
2024-09-05 10:19
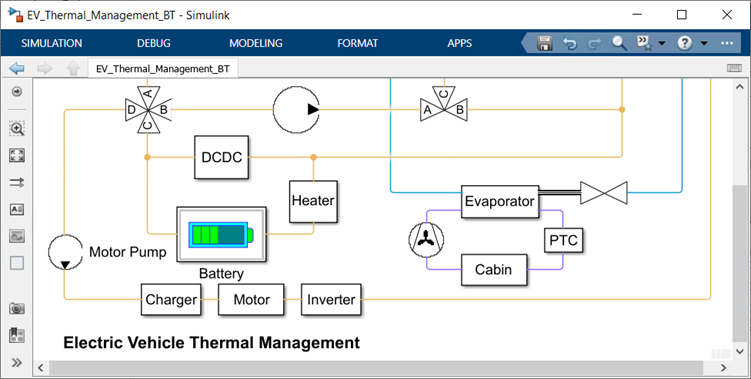
Simscape Battery™ 以模块库和 API的方式帮助我们对电池以及储能系统进行建模。我们可以用它来实现电芯电热耦合模型、配置和测试电池架构、设计电池管理系统,继而评估电池系统在正常和极端条件下的行为。
2024-09-05 09:45

审核编辑:彭静
2023-05-16 09:17
上一期我们提到了 Simscape Battery,这是个针对电池系统建模与仿真的工具箱。作为汽车动力总成系统的一个环节,它在油转电的大趋势下显得更为重要。当然,只有电池,车也是跑不起来的。我们还需要将它所储存的电能转为机械能,并传递到轮端。
2024-09-05 10:04
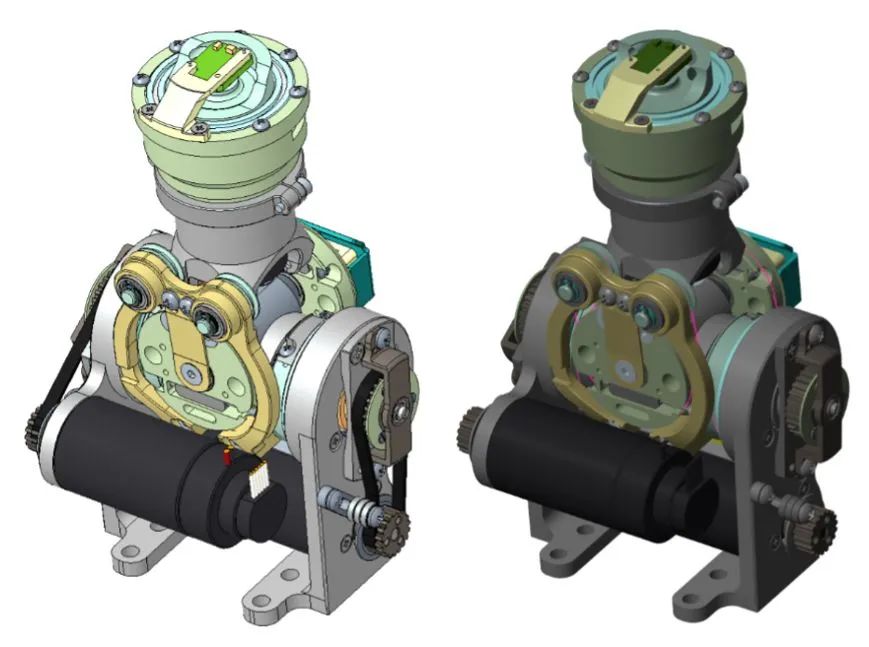
我们的团队隶属于意大利技术研究所 (IIT) 下设的 iCub Tech 机构,负责设计、开发和构建 iCub 开源机器人平台。目前,iCub 人形机器人广泛应用于全球 50 多个研究中心和研究所。它身高 1 米,具有 53 个自由度,其中头部有 6 个自由度,颈部有 3 个自由度,眼部有 3 个自由度。这款机器人还配备有 50 多个电机,以及力扭矩传感器和惯性测量单元。我们主要研究机电设计和低级控制固件,而我们在其他研究领域的同事负责开发更高级别的先进控制软件以支持各种应用,包括人与机器人接口和分身机器人系统。
2023-07-20 10:34