
多数函数滤波器的第一级是通过两个逻辑运算来实现的;第一个运算符 (AND) 检测到活动的 BEMF 信号。第二个运算符 (XOR) 检测活动 BEMF 信号的下降沿和上升沿。这两个操作的输出称为“有源屏蔽 BEMF”
2022-08-16 11:16
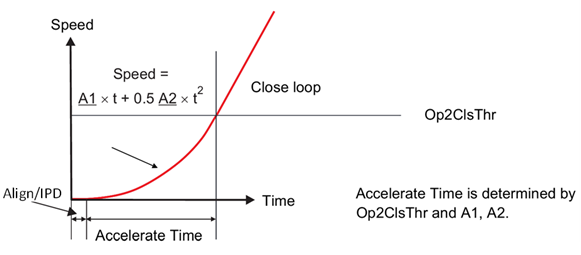
基于反电动势 (BEMF) 估计的高级无传感器算法需要最小值 BEMF 来准确估计转子的位置,以便在 180 度正弦模式下驱动 BLDC 电机。为了获得最小BEMF值,电机首先通过开环阶段驱动
2023-03-15 10:36

拥有专利US20170126153A1来检测失速情况,该专利采用BEMF一致性检测方法来检测,主要原理是检查两个BEMF的一致性。
2020-11-05 10:56
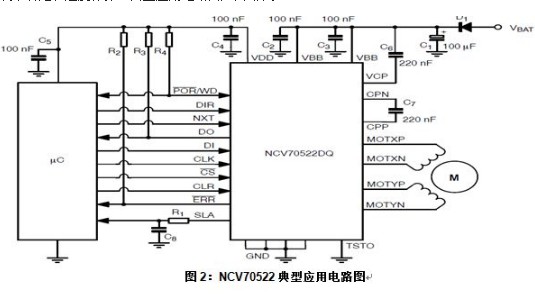
与传统步进电机驱动器IC相比,NCV70522包含BEMF输出,能够实时地准确地反应电机运转情况,非常适合汽车自适应前照灯系统中的应用。堵转检测阈值可以根据电机速度、负载特性及供电电压的不同来调节
2013-01-28 11:51
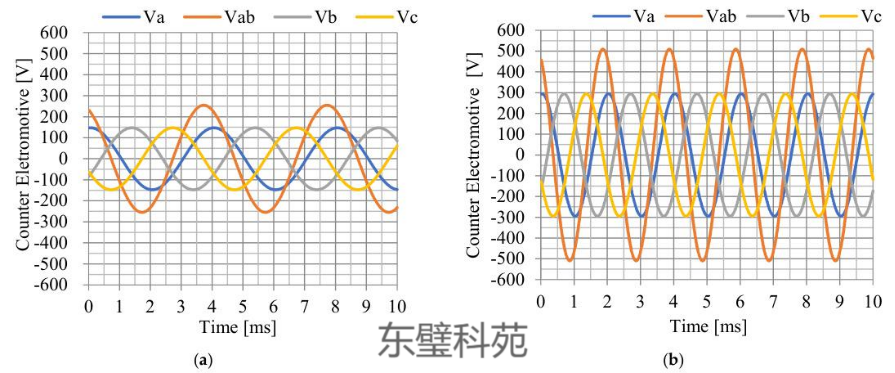
步进电机高速运行时,反电动势幅值增大、频率升高,导致电流建立延迟、扭矩下降及动态响应滞后。所以在步进电机高速运行的方案中,我们需要通过优化电机选型(如低电感、适中极数)、升压驱动及BEMF反馈控制,可缓解高速性能衰减,避免PWM饱和导致的扭矩崩溃。
2025-06-10 16:06
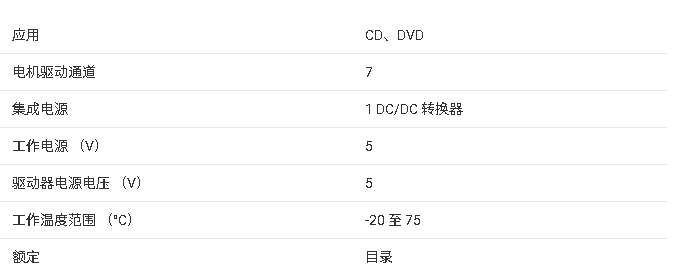
选择 主轴电机、雪橇电机、负载电机和对焦/跟踪/倾斜执行器。主轴 电机驱动器使用 BEMF 检测对主轴电机进行无传感器启动和控制
2025-10-17 18:06

支持自动换相、逐波限流,支持 HALL、BEMF 检测,还可实现转速的实时反馈和电机的控制,以及各类应用方案开发的前期预研;
2021-12-01 17:43

应用。DRV11873内置 过流保护,无需外部电流检测电阻。同步 整流工作模式提高了电机驱动器应用的效率。 DRV11873输出 FG 和 RD,以通过漏极开路输出指示电机状态。150° 无传感器 BEMF 为
2025-10-20 11:34

应用。DRV10866内置过流保护 无需外部电流检测电阻。同步整流工作方式 提高电机驱动器应用的效率。DRV10866输出 FG 或 1⁄2 FG 至 用漏极开路输出指示电机转速。实现150°无传感器BEMF控制方案
2025-10-20 10:08
调整软件中的系统。支持多个通信接口,如PWM和LIN。 Melexis TruSense技术将磁阻测量与BEMF(反电动势)感测相结合,可在剧烈变化的负载下的宽动态范围内提供高精度的转子位置信息。 PWM驱动方案可以适应任何电动机电流形状,从而实现最佳效率,低转矩脉动和最小化的任何辐射发射。
2021-05-15 07:42