
ARM7处理器为控制核心,采用无线通信技术,并移植嵌入式实时操作系统μC/0S一Ⅱ设计了一套智能机器人控制系统。
2021-04-09 11:46
最近一段时间,有关于华为芯片、华为手机的相关报道消息也是接连不断,最近发布的华为mate40,麒麟9000E其实是前代芯片的魔改版。从这里就能看出华为缺乏麒麟芯片了,也就是说下一代华为P50,可能不会采用麒麟芯片了。 最近又有外媒曝光了华为P50,在外观设计方面,根据展示的概念图,这款华为P50实现了一个大家都期待的真正全面的屏幕设计,因为前置摄像头采用了离屏技术。同时,它有一个非常窄的黑色边缘设计和非常处理上下框架,所以手机
2020-10-27 11:14
电流速断保护动作电流整定分起动状态速断电流定值和运行状态速断电流整定值,时限可为0s速断或整定极短的时限。
2022-09-07 10:25
电流速断保护动作电流整定分起动状态速断电流定值和运行状态速断电流整定值,时限可为0s速断或整定极短的时限。
2023-07-19 16:57
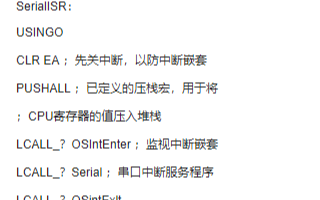
在移植的过程中,采用Keil C51作为编译环境。KeilC5l集成C编译和汇编器。中断子程序用汇编语言编写,放到移植μC/0S—II后的OS_CPU_A.ASM汇编文件中。下面是以串行口中断为例的移植中断服务子程序代码。
2020-09-24 09:47

本设计实现了基于μC/OS-II的中断下半部。这种机制的实现充分利用了μC/0S—II的现有资源,代码简洁而高效,且与平台相关性代码极少,方便移植。一组功能定义明确的API极大地方便了开
2011-08-03 10:00
;overflow-wrap:="" break-word="" !important;"="" style="transition: all 0.3s ease-in 0s; max-width: 100%;" 电路设计
2019-12-10 12:47

机器人要实现的动作和功能较多,需要多个传感器对外界进行检测,并实时控制机器人的位置、动作和运行状态。系统中的所有任务最终都挂在实时操作系统μC/0S一Ⅱ上运行,因此不仅要考虑微控制器的内部资源,还要看其可移植性和可扩展性。
2014-11-19 15:44

本次发生故障的车辆为某合资品牌的某款PHEV车型,该车型正处于PVS(Produktion Versuchs Serie)批量试生产阶段,该阶段是在零批量0S(批量生产前总演习,批产的全面验证)前进
2023-04-26 10:17

ARM7处理器为控制核心,采用无线通信技术,并移植嵌入式实时操作系统μC/0S一Ⅱ设计了一套智能机器人控制系统。
2018-04-18 17:02