激光雷达在测量距离的过程中容易受到很多因素的影响导致测量出现误差,从而使得测量精度受到影响,激光雷达的反射强度主要受到环
2024-04-02 12:58
作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。大部分激光雷达都会直接以测量距离作为其主
2023-02-09 15:36
尽管自动驾驶业界对激光雷达仍然存在不同的声音,但由于其创建周围环境高清3D点云图的能力,通常被认为是自动驾驶汽车的核心使能传感技术之一。激光雷达通过测量光传播到物体并反射所需要的时间,来提供汽车周围环境的3D点云图。
2019-12-22 09:07

LOG-LIO的流程接收来自3D激光雷达和惯性测量单元(IMU)的输入,如图2所示。对于新的输入扫描,我们首先使用Ring FALS来估计原始点的法线,在使用IMU测量校正畸变后,根据它们的局部几何信息,在未畸变的点
2023-08-18 15:45
激光雷达采用主动测距法,接收到的是物体反射回来的激光脉冲,激光雷达直接测量被测物体到雷达的距离,与立体视觉复杂的视差深度
2018-06-20 15:08
在视觉图像解释中,ND-8和ND-16被选为颜色更好的点云。如果图3所示的结果按从最详细到最不详细的顺序排列,分类如下:ND-8、ND-16、ND-4和ND-32。仅当摄影测量任务期间出现高太阳强度时,才应使用 ND-32 滤光片。
2022-10-27 16:12
ASTRALiTe的edge™是世界上第一个小型地形和水深扫描激光雷达,可以探测小型水下物体,测量浅水深度,并从小型无人机平台测量关键的水下基础设施。
2019-11-27 14:33
作为机器之眼的激光雷达因无人驾驶及机器人等领域的火热而备受关注。它是一种用于获取精确位置信息的传感器,可以确定物体的位置、大小、姿态等,相较于其他类型的传感器,激光雷达在测量精度和探测人体等方面
2020-06-28 11:48
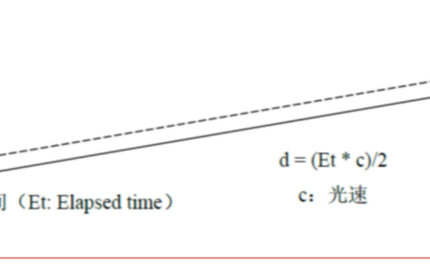
与雷达工作原理类似,激光雷达通过测量激光信号的时间差和相位差来确定距离,但其最大优势在于能够利用多谱勒成像技术,创建出目标清晰的 3D 图像。
2020-12-26 10:34
