
鼠标滚轮检测固件-20201009亲测okwheel/encoder原理wheel/encoder示波器实测波形wheel/encoder单片机检测固件wheel/encoder原理
2021-12-08 10:21
使用soc模式编译安装完sail的wheel后,导入出现以下问题 Traceback (most recent call last): File \"yolov5_bmcv.py
2023-09-18 06:41
2012-05-17 21:54
在《嵌入式实时操作系统UCOSIII》P152页,书上建议OS_CFG_TMR_WHEEL_SIZE可先设为定时器数量的1/4.且不建议将OS_CFG_TMR_WHEEL_SIZE设为定时器任务率的偶数倍,而且最好使用素数。这些建议的目的是什么?其依据又是什么?麻
2020-05-26 02:11
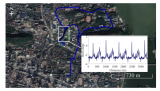
移动机器人需要一种对环境干扰具有鲁棒性的可靠位姿估计器,为此,惯性测量单元(IMU)发挥了重要作用,因为它们可以独立感知车辆的全运动状态。
2023-06-02 14:55
RX Capacitive Touch Evaluation System Self-Capacitance Touch Button/Wheel/Slider Board 用户手册 Rev.1.00
2023-07-10 20:47
RX Capacitive Touch Evaluation System Self-Capacitance Touch Button/Wheel/Slider Board 用户手册 Rev.1.00
2023-03-24 18:58
滑条触摸适用于需要渐进式调节的控制应用,包括调光器、音量控制件、速度控制等。一个滑条传感器由多个相邻的触摸PAD组成。软件上采用重心算法计算出当前触摸位置,最大255级分辨率。滑轮滑条触摸Demo采用芯圣触摸芯片,方便用户前期学习开发测试,支持2.0V至5.5V宽工作电压和-40℃至85℃工作温度,并具备4KV ESD和4KV EFT的高抗干扰能力,CS过动
2020-11-04 11:28 上海芯圣电子股份有限公司 企业号
的轮子转向定义为正转,即看轮子外侧为顺时针旋转。控制轮子代码如下:void wheel_set_scroll(wheel_type *wheel,e_wheel_scr
2022-12-23 09:31
鼠标滚轮检测固件-20201009亲测okwheel/encoder原理wheel/encoder示波器实测波形wheel/encoder单片机检测固件wheel/encoder原理
2022-02-11 06:45