电子发烧友
2963次浏览

SIFT特征是基于物体上的一些局部外观的兴趣点而与影像的大小和旋转无关。对于光线、噪声、微视角改变的容忍度也相当高。SURF也是一种类似于SIFT的兴趣点检测及描述子算法。其通过Hessian矩阵的行列式来确定兴趣点位置,再根据兴趣点邻域点的Haar小波响应来确定
2017-12-15 07:56
1970-01-01 08:00
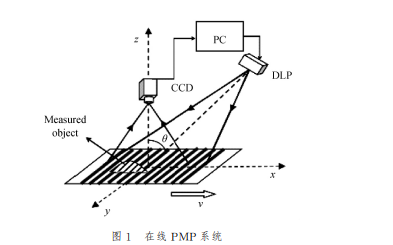
提出了一种采用加速鲁棒特征算法匹配运动物体的特征点,实现在线三维测量的方法.该 方 法只需投影一固定的正弦光栅到在线运动中的被测物体表面上,使投影光栅线垂直运动方向,当物体每移动相同的距离,由
2019-09-09 08:00
介绍了SURF算法和MeanShift算法的基本原理。将MeanShifl跟踪算法应用于视觉鼠标技术。提出了基于OpenCV技术的视线系统设计方法;提池了基于
2011-09-14 15:10
针对传统的SURF算法未使用图像的颜色信息,提出了一种基于颜色信息和SURF特征相结合的混合图像匹配算法,算法通过提取目
2015-12-24 16:05
机器视觉算法有很多,以下是其中一些常见的算法: 边缘检测算法:用于检测图像中的边缘,如Sobel算法、Canny算法
2023-03-12 11:55
针对照明变化、形状变化、外观变化和遮挡对目标跟踪的影响,提出一种基于加速鲁棒特征( SURF)和多示例学习( MIL)的目标跟踪算法。首先,提取目标及其周围图像的SURF特征;然后,将
2017-12-09 09:46
针对定向二进制简单描述符( ORB)算法不具备尺度不变性的问题,提出一种结合快速鲁棒性特征( SURF)算法和ORB的改进算法。首先,利用Hessian矩阵检测特征点的
2017-12-15 17:15
;采用FAST特征点表示影像地标,利用高斯金字塔结构以及仿射增强策略改进FAST特征点的尺度和仿射不变性,提升影像地标匹配率。将实验结果与尺度不变特征变换( SIFT)算法和加速鲁棒性(SURF)算法进行比较。实验结
2017-12-19 14:50
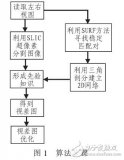
针对目前立体匹配中存在的匹配精度和匹配速度很难兼顾的问题,提出了一种基于稳定特征点和SLIC超像素分割算法的快速立体匹配。利用SURF算法高速有效地提取出特征点进行匹配,并且利用三角剖分的方法对稳定
2017-11-15 15:26