mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050
2018-03-09 09:15
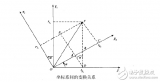
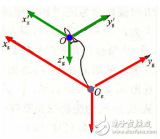
最近在研究小四轴的飞行,姿态检测主要用到的传感器是MPU6050。从MPU6050读出来的加速度和角速度数据最后要转成姿态,可以转换成欧拉角(偏航角、俯仰角和滚转角)或
2017-11-07 10:39
介绍了mpu6050姿态融合原理及程序代码分析,MPU6050是一款姿态传感器。主要介绍三种姿态融合算法:四元数法、一阶
2017-12-11 13:31

本文主要介绍了mpu6050姿态解算原理分析及程序设计,MPU6050硬件DMP解算姿态是非常简单的,四元数法只求解四个未知量的线性微分方程组,计算量小,易于操作,是比
2017-12-11 13:51
对于大多数MPU6050的应用来说,获取到的原始数据并没有多大用处,我们需要对原始数据进行姿态融合解算,最终得到姿态数据,也就是三个欧拉角:航向角(yaw)、横滚角(roll)和俯仰角(pitch)。
2023-06-15 15:03
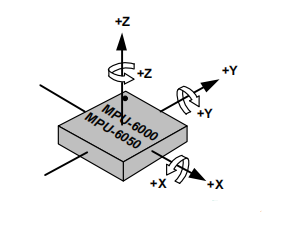
MPU6050是6轴运动处理传感器,它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP。使用它就是为了得到待测物体(如四轴飞行器、平衡小车)x、y、z轴的倾角(俯仰角Pitch、翻滚角Roll、偏航角Yaw)。
2024-02-15 10:53
一、简介 1.MPU6050是一种常用的六轴姿态传感器模块,结合了三轴陀螺仪和三轴加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口
2023-10-10 16:42

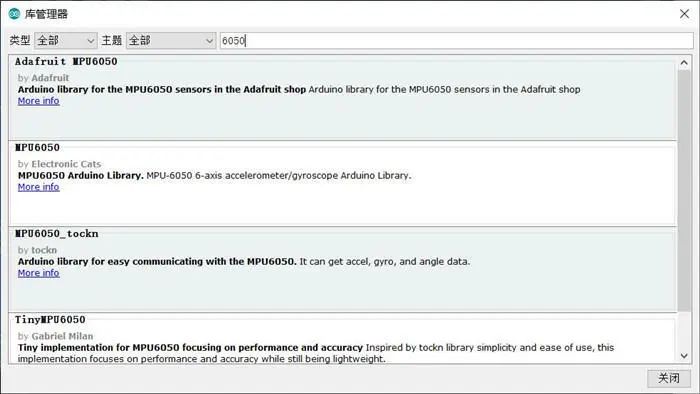
本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及MPU6050DMP初始化函数、D
2017-12-11 14:26

本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与卡尔曼滤波的应用,最后介绍了mpu6050卡尔曼滤波分析及mpu6050卡尔曼滤波输出姿态角程序。
2018-03-09 08:57
