ROS主控读取stm32发送的数据 之后便可以通过 Stm32_Serial .read (Receive_Data_Pr,sizeof(Receive_Data_Pr)); read函数读取串口
2023-11-26 17:49
基本概念: ROS是一个用于在不同进程间匿名的发布、订阅、传递信息的中间件。 ROS2系统的核心部分是ROS网络(ROS Graph)。
2023-11-27 11:21

硬件连接 ROS主控通过usb线连接到一个TTL电平转换芯片,再由这个电平转换芯片连接STM32芯片 电平转换芯片可以通过PCB设计在STM32芯片的电路板上,也可以使用一个USB转TTL的模块
2023-11-26 17:45
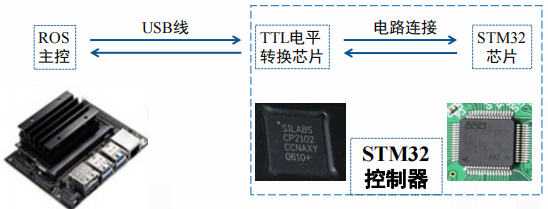
硬件连接 ROS主控通过usb线连接到一个TTL电平转换芯片,再由这个电平转换芯片连接STM32芯片 电平转换芯片可以通过PCB设计在STM32芯片的电路板上,也可以使用一个USB转TTL的模块
2023-11-17 18:00

编辑整理:strongerHuang 作者:Francesca Finocchiaro 关注我的读者中应该有部分是做ROS相关的工作,今天就来分享一个基于FreeRTOS的micro(微型)ROS
2020-09-25 14:16

对于ROS而言,其最常用的就是Topic话题以及Service两个了。之前我们在了解Unity Robotics Hub时候就了解到基本的Unity和ROS的通讯,下面我们来详细介绍一下Unity
2023-11-17 17:22
对于熟悉机器人应用的读者,ROS想必定是不会陌生的。ROS可以说是目前机器人相关开源社区最流行的项目。每一种类型的机器人都需要以硬件的实际情况编写符合用户需要的功能,起初代码的复用率很低,大大阻碍了
2022-04-07 07:13

近来找到的实习主要是做智能车控制,用到的也就是ROS机器人操作系统,ROS需要运行在一个操作系统上,这个操作系统常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS组合就是实习的主要学习内容了。
2023-05-19 17:07
ROS是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。ROS的原型源自斯坦福大学的STanford
2023-05-19 17:45
