
paddle_inference_ros_demo功能包是基于paddle_inference_ros开发的,帮助开发者快速体验paddle_inference在ROS环境下的推理部署效果的功能包。可以直接进入该项目
2023-10-20 17:02
ROS,即 Robot Operating System,是机器人领域主流的开源平台,提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理等功能。
2022-10-14 10:09

现在市面上最常见的还是USB摄像头,物美价廉,要想使USB摄像头在ROS下正常工作,我们就需要一个软件包来支持,现在ROS下最常用的usb摄像头软件包就是usb_cam了,简单理解该软件包就是V4L(Video for Linux)USB摄像头驱动在
2023-10-29 11:26
机器人操作系统 ROS (Robots Operating System) 最早是斯坦福大学的一个软件框架,现在不管是工业机器人,还是娱乐用的机器人都运行着 ROS。
2020-05-29 17:05
ROS(Robot OperatingSystem)是开源的机器人系统平台。使用这个之后,机器人就可以看见东西、测绘、导航,或是以最新的算法作用于周围的环境当中。假如想要制造复杂的机器人,已经准备好
2019-01-15 13:57
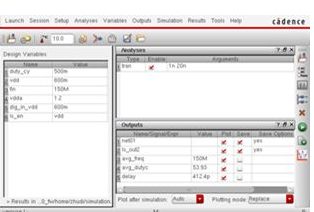
Cadence小技巧有很多,今天就来介绍一种利用lib功能免除新ADE的设置的办法。详细的内容请看文章。
2018-02-18 15:00
需要ROS,OSDK,MSDK,三大类的包,后面是行人监测+KCF追踪。
2023-01-29 15:10

设备笔者有一个需求,需要结合ROS做模拟量采集。有一种解决方法是ADC芯片+STM32主控,通过串口的方式与上位机通信,但串口通信速度很慢,达不到要求遂放弃。也考虑过使用NI的数据采集卡,貌似NI
2024-06-30 08:23 福州市凌睿智捷电子有限公司 企业号
ROS ( Robot Operating System, 机器人操作系统) ,提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。
2019-12-21 11:20
