STM32-机器人制作实践入门教程
2016-08-20 16:14

以特种变结构履带式机器人为研究对象,结合机器人的结构特点和性能指标,搭建了基于STM32 的机器人控制系统。采用模块化设计的思想和策略,针对特种变结构履带式
2017-10-31 15:27
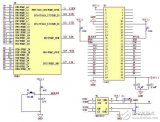
设计了基于COMX和STM32的机器人伺服控制器解决方案。首先介绍了COMX模块的功能及结构,然后设计了基于FSMC的接口电路来控制COMX。
2014-10-17 13:43
一台能够工作的计算机要有这样几个部分:CPU(Central Processing Unit,中央处理单元:进行运算、控 制)、RAM(Random Access Memory,随机存储器:数据存储)、ROM(Read Only Memory,只读存储器: 程序存储)、输入/输出设备(串行口、并行口等)。在个人计算机上这些部分被分成若干块芯片或者插卡, 安装一个称为主板的印制线路板上。而在单片机中,这些部分全部被做到一块集成电路芯片中,所以就称为 单片机。
2022-11-21 15:20
OpenMV项目旨在通过开发开源的低成本机器视觉摄像机,为业余爱好者和制造商提供机器视觉。第一代OpenMV摄像机基于STM32F ARM Cortex-M MCU和Omnivision
2020-09-29 14:49
[img][/img]STM32-机器人制作实践入门教程
2016-08-16 09:59
龙人六足机器人是有六条腿的仿生机器人,每条腿有两个自由度,由两个角度舵机控制。控制器采用Stm32机器人控制器,通过编程
2016-03-23 17:49
龙人六足机器人龙人六足机器人是有六条腿的仿生机器人,每条腿有两个自由度,由两个角度舵机控制。控制器采用
2016-03-24 16:25