2011 ATMEL AVR 校园设计大赛——基于光电循迹和超声波避障的小车
2018-07-10 03:20

第13章-循迹功能 循迹小车讲解 原理分析 STM32智能小车循迹教程
2024-08-21 16:27
AGV(自动导引车)小车使用避障雷达是为了确保其在运行过程中的安全性和稳定性。避障雷达,如激光雷达或超声波雷达,能够实时
2024-05-20 10:48
本项目是在 PVCBOT-A型 基础平台车——BEAM小车的基础上,加装了避障传感器以及控制电路,组成了一台具体有避障功
2018-09-18 09:35
课题的技术要求:本次课题最终要求小车能在无人操作的条件下实现自动避障,避障基于超声波测距的原理实现的,当超声波检测到
2023-07-17 09:28
树莓派4代无线视频智能小车 含PI4B-4GB 可以实现红外避障、循迹、蓝牙/红外/WiFi遥控和视频监控等应用 型号 AlphaBot2-Pi4B-4GB 树莓派4代
2019-11-07 11:09

5STM32超声波测距STM32F103C8t6超声波避障小车
2024-08-15 16:25
本项目利用D1 Dock Pro的USB拍照程序,结合L298N电机驱动模块和红外探测循迹光电传感器模块,制作了一个拥有智能寻路+避障功能的小车。该项目为“玄铁杯第二届
2022-12-22 14:27
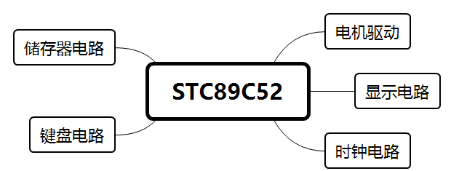
本设计由STM32F103C8T6单片机核心板电路+拨动开关电路+2路按键电路+2路红外对管电路+2路红外避障模块电路+L298N电机控制电路组成。 1、通过拨动开关选择工作模式,即寻迹模式和
2020-11-02 10:25