以STM32F103RCT6为控制核心的二轮 ZIP内有代码+PCB原理图+GERBER文件+BOM清单+程序说明+总结报告+参考资料...
2022-05-25 15:33
stm32f103c8t6的平衡小车的代码
2022-06-15 14:51
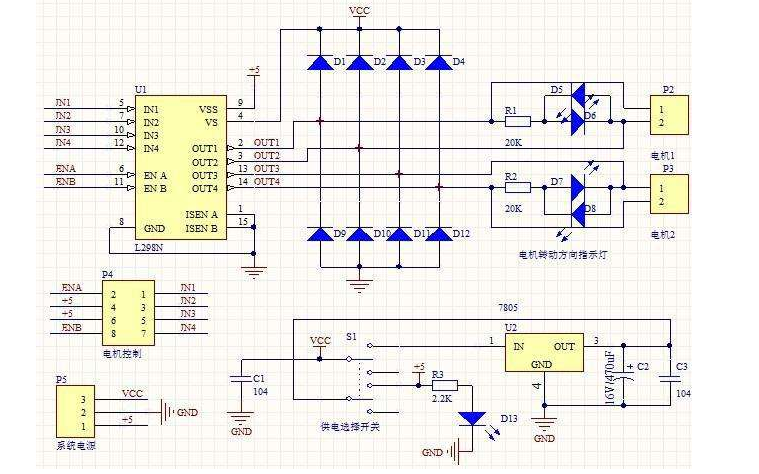
STM32f103c8t6平衡小车原理图
2024-07-05 10:54

作为diy玩家,我的平衡小车主板采用模块化方式,即驱动模块、主控模块、通信模块等模块采用直插式连接到主控板上,主控板同时可充当平衡小车底板。
2021-12-17 18:12
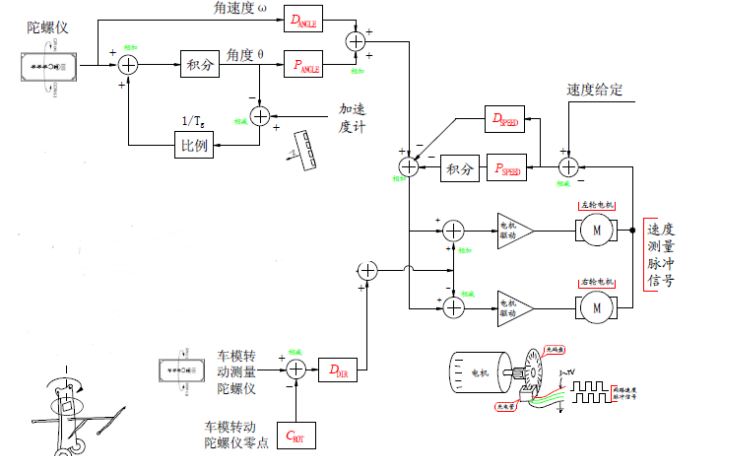
前面已经学习了一些平衡小车的基础知识,接下来将和大家- -起以工程的思想去完成一个平衡小车的调试,包括平衡
2019-04-23 08:00
前言:之前做arduino小车的时候使用的是L298N电机,没有用过编码器,这次第一次用编码器,还是比较懵圈,记录一下学的整个过程。 霍尔编码器是一种通过磁电转换将输出轴上的机械几何位移量转换成
2023-03-20 14:13
TB6612FNG简介 单片机引脚的电流一般只有几十个毫安,无法驱动电机,因此一般是通过单片机控制 电机驱动芯片 进而控制电机。TB6612是比较常用的电机驱动芯片之一。 TB6612FNG可以同时控制两个电机,工作电流1.2A,最大电流3.2A。 VM电机电源正极,是驱动电压输入端(>10V), VCC为逻辑电平输入端(2.7V~5.5V)。 PWMA/PWMB为两个电机提供p
2023-05-16 15:18
平衡小车是通过两个电机运动下实现小车不倒下直立行走的多功能智能小车,在外力的推拉下,小车依然保持不倒下。这么一说可能还没
2018-07-16 08:00
预告:代码及文档下载方案分析1、基于STM32F103C8T6 单片机的双轮自平衡小车系统;2、以 MPU6050 三轴陀螺仪加速计为传感器的姿态感知系统;3、通过卡尔曼滤波对传感器的数据进行滤波
2021-11-30 08:03
自从肝了这么多stm32的视频,一直没有做项目来实践。这次的平衡小车项目
2021-08-11 07:51