
这是一份超大的机器人专用巡线地图。1030mm*660mm,正反面两用。有8字形和椭圆形两种线路。优质纸张不易损坏。可用于各种教育机器人的巡线地图。
2019-12-27 16:51
巡线机器人,作为一种先进的智能巡检设备,近年来在多个领域得到了广泛应用。它以移动机器人为载体,搭载多种检测仪器,通过机器视觉、电磁场、GPS、GIS等多场信息融合技术,实现自主移动、自主巡检与数据
2024-07-04 17:02

Mini巡线传感器以稳定的TTL输出信号帮助机器人进行白线或者黑线的跟踪(可以检测白背景中的黑线,也可以检测黑背景的白线)。该产品灵敏度高,抗干扰能力强,普通照明灯基
2019-12-10 14:33
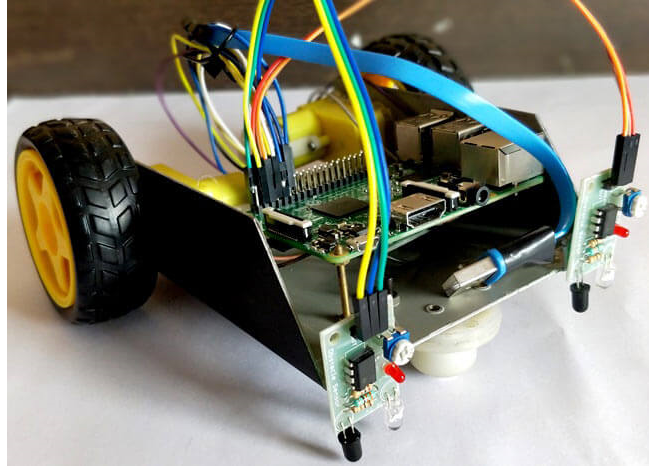
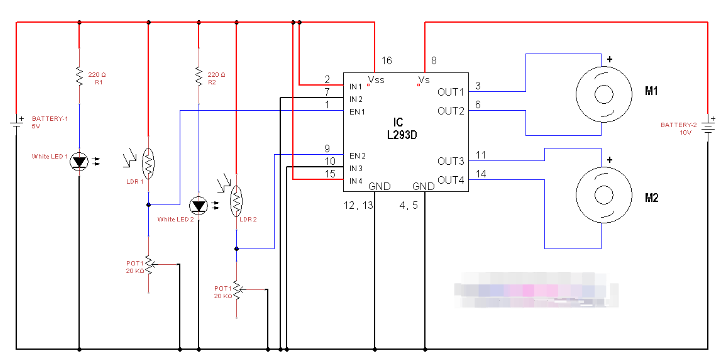
众所周知,树莓派是一个基于ARM微处理器的开发平台。凭借其强大的计算能力,它在广大电子爱好者中经常会创造出奇迹。为了更好地了解树莓派及其工作原理,让我们尝试使用树莓派制作一个巡线机器人。
2022-04-08 16:38
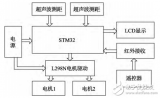
本文主要介绍了一种基于STM32的可遥控智能跟随小车的设计与实现,采用了超声波测距、电机驱动、红外遥控等功能模块设计。STM32连接了LCD显示模块和红外接收电路,分别用于显示运动、状态信息和接收遥控器的控制信号。
2017-12-23 14:47

学习一种单片机最快的方式莫过于用它实际制作一个作品了,前些天看到有人在玩平衡小车,感觉非常有趣,于是就决定自己动手制作一个基于stm32的两轮平衡小车。从电路板设计,到程序编写,一步一步的,希望自己在这个过程中有一定
2023-07-25 15:48

1、项目简介在本次项目中,我们将采用LockAI视觉摄像头与OpenCV-C++技术相结合的方式来实现特定场地内的视觉巡线任务。控制方面,我们选用了小凌派-RK2206开发板,该开发板运行
2025-03-31 09:56 福州市凌睿智捷电子有限公司 企业号

本文主要介绍了一种基于STM32单片机的视频遥控小车的设计,采用STM32单片机作为主制器,通过一款Wifi射频模块RT5350实现远程视频画面的传输,整个项目涵盖的知识面广,包括单片机编程技术,OpenWrt路由器
2017-12-25 14:52
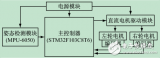
本文主要对基于STM32和MPU-6050的两轮自平衡小车系统设计与实现进行了分析,采用高性能STM32F103C8T6作为主控制器,采用卡尔曼滤波算法和双闭环PID控制算法对
2017-12-23 16:36
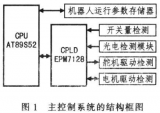
方向。因此。有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于5l型单片机的自动巡线轮式机器人控制系统。
2019-08-04 10:09