
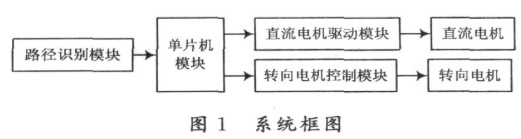
本文设计方案以MSP430单片机为系统的控制核心,采用反射式光电传感器模块寻迹,实现智能小车的自动寻迹行驶。在实验中采用与白色相差很大的黑色引导线作为智能
2013-09-30 10:05
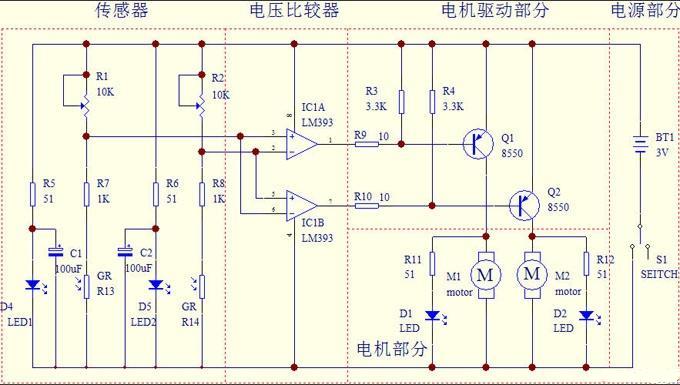
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用
2014-04-29 15:13
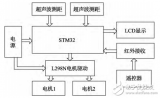
本文主要介绍了一种基于STM32的可遥控智能跟随小车的设计与实现,采用了超声波测距、电机驱动、红外遥控等功能模块设计。STM32连接了LCD显示模块和红外接收电路,分别
2017-12-23 14:47
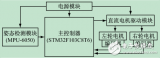
本文主要对基于STM32和MPU-6050的两轮自平衡小车系统设计与实现进行了分析,采用高性能STM32F103C8T6作为主控制器,采用卡尔曼滤波算法和双闭环PID控
2017-12-23 16:36
在小车的中部平行装有两个色标传感器,采用查询检测的方法对黑线进行检测。89C51在检测到黑线信号后,通过89C51的PI.5和Pl.6口得知是哪一个传感器检测到黑线,以此作为调整小车方向的基准。
2019-05-17 15:49

学习一种单片机最快的方式莫过于用它实际制作一个作品了,前些天看到有人在玩平衡小车,感觉非常有趣,于是就决定自己动手制作一个基于stm32的两轮平衡小车。从电路板设计,到程序编写,一步一步的,希望自己在这个过程中有一定
2023-07-25 15:48

本文主要介绍了一种基于STM32单片机的视频遥控小车的设计,采用STM32单片机作为主制器,通过一款Wifi射频模块RT5350实现远程视频画面的传输,整个项目涵盖的知
2017-12-25 14:52
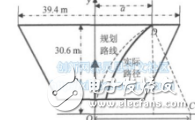
视觉导航作为新兴起的技术,受众多研究者的青睐.设计了以现场可编程门列阵(FPGA)为控制核心的自主导航小车,采用一种新颖的自适应路径识别算法实现路径的识别与提取,并结合圆弧路线规划和控制策略完成小车的自主导航控制.自
2017-11-18 12:29
智能运输系统是未来交通运输系统发展的趋势,智能汽车在智能运输系统中扮演着十分重要的角色。作者提出智能寻迹车作为构建未来智能交通运输系统中重要部分,针对未来交通运输系统有导航线的环境命题假设下智能汽车的自主寻迹问题,提
2020-05-07 09:19
这是一款基于OpenHarmony系统和小凌派-RK2206开发板的避障小车。同时,小车上搭载了超声波测距模块、舵机模块、红外寻迹模块、直流电机模块。
2022-04-21 07:58