相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差信息,推算目标距离。
2016-11-05 03:46
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。双目立体视觉系统一般由
2018-02-08 14:46
由于双目视觉监控系统可以模仿人眼功能,感知三维世界信息,能够得到被测对象到CCD摄像机的深度信息,近几年已开始在需要三维立体检测的领域得到应用。另外,双目视觉监控系统也
2020-05-07 09:55
双目标定和普通相机的标定一样,其标定时不仅标定出两个相机的内参,还要标定出两个相机之间的关系。因此,在进行双目标定时,需要使两个相机对同一标定板进行多次取图,分别标定出各自的内参和相对于标定板的外参,然后便可计算出两相机位置间的关系:
2022-10-10 17:25
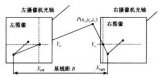
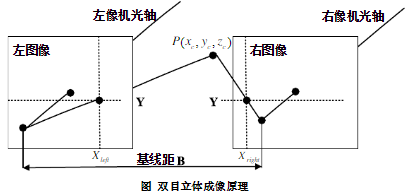
双目立体视觉是基于视差,由三角法原理进行三维信息的获取,即由两个摄像机的图像平面和北侧物体之间构成一个三角形。一直两个摄像机之间的位置关系,便可以获得两摄像机公共视场内物体的三维尺寸及空间物体特征点的三维坐标。所以,双目视觉
2018-04-11 14:32
摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
2022-08-10 11:38
审核编辑:彭静
2022-10-31 16:28
嵌入式视觉”与标准机器视觉系统之间的明显区别有时并不容易。进行分类的一种方法是将它们分解为三个部分。
2019-08-17 12:00
双目立体测量的特点类似于“双目导航、定位”,一般来说:第一、需要提取的点不多,仅把被测物需要测量部分的点找到即可;第二、速度要求较高,一般要求一秒中测量多个产品;第三、对光照环境要求高。因为测量的时候相机和被测物必然有相对位移,所以拍摄到的图像可能各个角度都会有。
2018-01-23 11:32
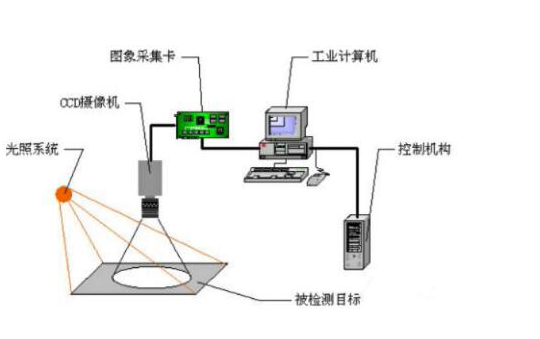
从机器视觉系统字面意思就可看出主要分为三部分:机器、视觉和系统。机器负责机械的运动和控制;视觉通过光源、工业镜头、工业相机、图像采集卡等来实现;
2019-05-14 09:24