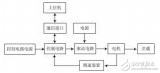
什么是串级PID?顾名思义就是两个串起来的PID,下面是一个双闭环的例子,外环是位置环,内环是速度环,最终的执行器是电机
2022-07-03 14:26
//主程序====================================================== #include “Main.h” #include
2018-12-04 14:53

上述角度单环PID控制算法仅仅考虑了飞行器的角度信息,如果想增加飞行器的稳定性(增加阻尼)并提高它的控制品质,我们可以进一步的控制它的角速度,于是角度/角速度-串级PID控制算法应运而生。
2023-12-11 17:35
STM32的定时器是个强大的模块,定时器使用的频率也是很高的,定时器可以做一些基本的定时,还可以做PWM输出或者输入捕获功能。 以下是进行stm32定时器中断的主要程序: st
2017-10-12 16:59
CAN基础知识介绍文中介绍了CAN协议的基础知识,以及STM32F4芯片的CAN控制器相关知识,下面将通过实例,利用STM32CubeMX图形化配置工具,来实现CAN通讯的环回测试
2023-01-04 15:23

根据公式,就可以编出计算output的arduino程序如下: 注:程序源码可以在原文上复制。 可是在上面的程序中,当PID不规则的调用时就会出现两个问题: 1.有
2018-01-18 14:27
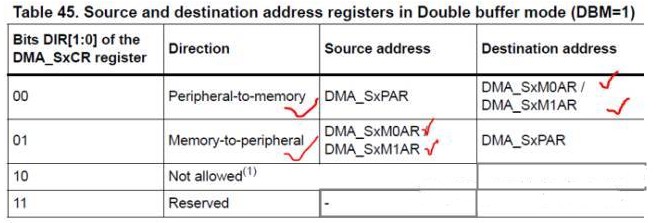
目前STM32家族中有些系列支持DMA的双缓冲模式,比如STM32F2/STM32F4/STM32F7等系列。尤其随着人
2019-02-02 16:47
本文主要介绍了一种基于STM32的直流电机PID调速系统设计与实现,该调速系统能够实现对电机的启动、制动、正反转调速、测速和数据上传等功能,可方便地实现直流电机的四象限运行。实验结果表明,该系统具有稳态误差小,控制精度高,响应速度快,能耗低、效率高等优点
2017-12-25 15:20
很多同学都不清楚PID是个什么东西,因为很多不是自动化的学生。他们开口就要资料,要程序。这是明显的学习方法不对,起码,首先,你要理解PID是个什么东西。
2018-01-29 11:57
本文主要介绍了关于LDC1000的STM32驱动源程序,希望能对各位有所帮助。
2018-08-13 10:43