
我们前一篇关于人物识别跟踪的文章《视频连续目标跟踪实现的两种方法和示例(更新)》里讲到,视频图像中物体的识别和跟踪用到了卡尔曼滤波器(KF)。这里对这个话题我们稍微对这
2024-11-04 11:36
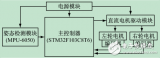
本文主要对基于STM32和MPU-6050的两轮自平衡小车系统设计与实现进行了分析,采用高性能STM32F103C8T6作为主控制
2017-12-23 16:36
卡尔曼滤波器是一种基础预测定位算法。原理非常简单易懂。
2022-03-21 13:47
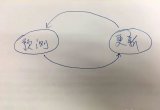
卡尔曼滤波器是一种基础预测定位算法。原理非常简单易懂。核心过程可以用一个图说明。
2023-05-09 17:30

学习一种单片机最快的方式莫过于用它实际制作一个作品了,前些天看到有人在玩平衡小车,感觉非常有趣,于是就决定自己动手制作一个基于stm32的两轮平衡小车。从电路板设计,到
2023-07-25 15:48

在很多实际工程问题当中,非线性系统占大多数,而卡尔曼提出来的卡尔曼滤波器是一种针对线性系统的估计算法[1]。 为了解决这
2022-08-12 10:06
卡尔曼滤波器是一种基础预测定位算法。原理非常简单易懂。核心过程可以用一个图说明:
2022-03-21 13:37
就是这样,卡尔曼滤波器就不断的把covariance递归,从而估算出最优的温度值。他运行的很快,而且它只保留了上一时刻的covariance。上面的Kg,就是卡尔
2018-03-31 10:46
卡尔曼滤波器的系统建模非常重要,完成了系统建模,也就完成了滤波器的一半设计。
2018-09-23 11:35

本文对于扩展卡尔曼滤波、无迹卡尔曼滤波仅仅做了一些简要介绍,不再想上次的
2024-01-14 14:29