STM32的串口空闲中断就是检测到接收数据后,在数据总线上的一个字节时间内,没有接收到数据触发空闲中断。RXNE置位一次,空闲总线就检测一次。关于
2017-12-27 09:02
空闲任务是 FreeRTOS 必不可少的一个任务,其他 RTOS 类系统也有空闲任务,比如 uC/OS。看名字就知道,空闲任务是处理器空闲的时候去运行的一个任务,当系统
2023-07-30 10:55
很少看到有资料写如何以中断的方式发送一帧数据,如果以等待的发送 数据帧 ,对高速运行的 单片机 来说是很浪费时间的,下面就介绍一种使用中断方式
2018-06-03 09:23
数据帧 对于发送设备和接收设备来说,两者的串行通信配置应该设置为完全相同。 起始位:起始位是在实际数据之前添加的同步位。起始位标记数据包的开始。通常,空闲数据线,即当数据传输线不传输任何数据时,它
2023-11-09 17:42
有人在使用STM32的UART收发并开启空闲中断时,有时会发现空闲中断相比预期多进一次的情况。
2023-03-02 15:00

使用STM32的串口进行DMA发送(Noraml模式),在某个任务中连续调用两次发送函数log_printf(),但是发回的数据在串口调试助手上显示与预期不符。第一次
2018-06-08 08:13
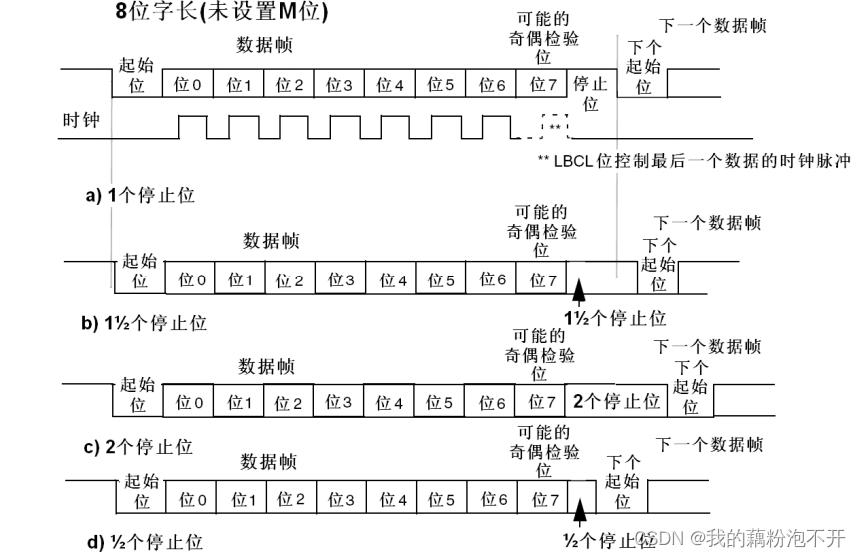
端。STM32的串口资源有USART1、USART2、USART3. 串口的几个重要的参数: 波特率,串口通信的速率 空闲,一般为高电平 起始位,标志一个数据帧的开始,固定为低电平。当数据开始
2023-11-10 15:58
Send_Data的tx 中填入要发送的字节 Send_Data .tx[ 0 ]=FRAME_HEADER; //frame head 0 x 7 B //帧头 0 X 7 B Send_Data
2023-11-26 17:49
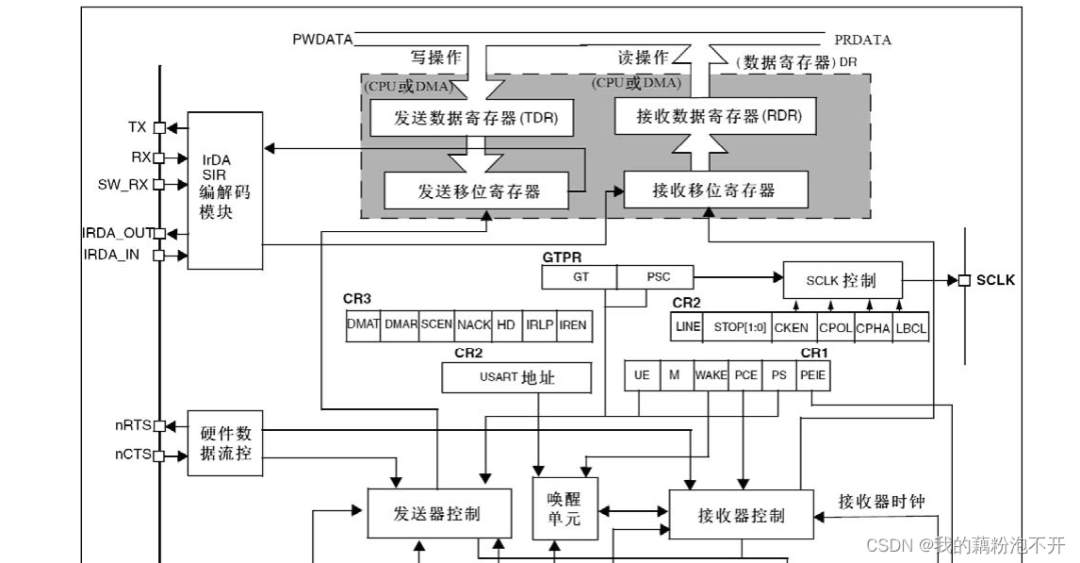
USART是STM32内部集成的硬件外设,可以根据数据寄存器的一个字节数据自动生成数据帧时序,从TX引脚发送出去,也可以自动接收RX引脚的数据帧时序,拼接成一个字节数据
2023-11-10 16:04
