
基于NeRF的SLAM算法采用全局地图和图像重建损失函数,通过可微分渲染捕获稠密的光度信息,具有高保真度。
2024-01-26 10:48

一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有
2021-04-18 10:18
一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有
2023-03-27 11:06

SLAM算法运行的重要传感器。基于激光雷达的SLAM算法,对激光雷达SLAM总体框架进行介绍,详细阐述前端里程计、后端优
2024-11-12 10:30
SLAM技术可以应用在无人驾驶汽车、无人机、机器人、虚拟现实等领域中,为这些领域的发展提供了支持。SLAM技术的发展已经逐渐从单纯的定位和地图构建转向了基于场景理解的功能。
2024-04-04 11:50
在室内移动机器人的导航中,机器人的定位与地图创建是机器人研究中一个基础且重要的问题。
2020-04-13 17:18

本文为作者在从事Slam相关工作中对这几年遇到以及改进过相关VIO算法内容总结。 1.背景介绍 一个完整的 SLAM(simultaneous localization and mapping
2021-11-03 09:45
激光雷达分单线和多线这两大类,针对这两类Lidar所使用的算法也不尽相同。 首先单线雷达一般应用在平面运动场景,多线雷达则可以应用于三维运动场景。
2023-03-27 11:02
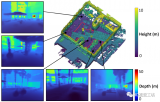
LONER是一个纯LiDAR算法,也没有使用IMU。雷达扫描首先降采样(将为5 Hz),然后用ICP跟踪,并从场景几何中分割出天空。对于建图线程,是使用当前关键帧和随机选择的过去关键帧来更新,并维护一个滑窗来优化。
2023-10-25 10:48
问题可以描述为:将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边逐步描绘出此环境完全的地图,同时一边决定机器人应该往哪个方向行进。
2023-01-07 10:09