
基于NeRF的SLAM算法采用全局地图和图像重建损失函数,通过可微分渲染捕获稠密的光度信息,具有高保真度。
2024-01-26 10:48
在室内移动机器人的导航中,机器人的定位与地图创建是机器人研究中一个基础且重要的问题。
2020-04-13 17:18

在室内移动机器人的导航中,机器人的定位与地图创建是机器人研究中一个基础且重要的问题。
2019-12-18 16:57

一方面获取传感器采集的各帧数据对应的局部坐标系的位置和姿态是构建地图的关键, 即建图包含了定位问题; 另一方面构建准确的地图又是精确定位的前提, 因此, 定位与建图两者是高度耦合的,可作为一个问题寻找解决方案。
2024-01-18 16:39
算法框架和关键模块, 分析阐述了近年来的研究热点问题和未来发展趋势, 梳理了3D激光雷达 SLAM 算法性能的评估标准, 并据此选取目前较为成熟的具有代表性的6种开源 3D 激光雷达
2022-03-21 16:07
目前,SLAM算法通过估计的相邻帧之间的位姿变换不断叠加进行位姿信息计算,随着巡检时间的增加,每次位姿估计中的偏差不断累积形成较大的累积误差,制约了算法的定位精度。
2023-05-03 10:03

其中,SLAM算法插件提供了SLAM领域流行的优秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,这些插件可以直接集成到自己的代码中,研究人员也可以基于这
2019-03-07 09:42
LINS是以滤波为主的IMU、激光雷达紧耦合的激光SLAM算法。该算法的主要创新点就是用以 IESKF(即迭代误差卡尔曼)为框架,融合 IMU 与激光雷达。该算法于发表
2022-10-09 14:57
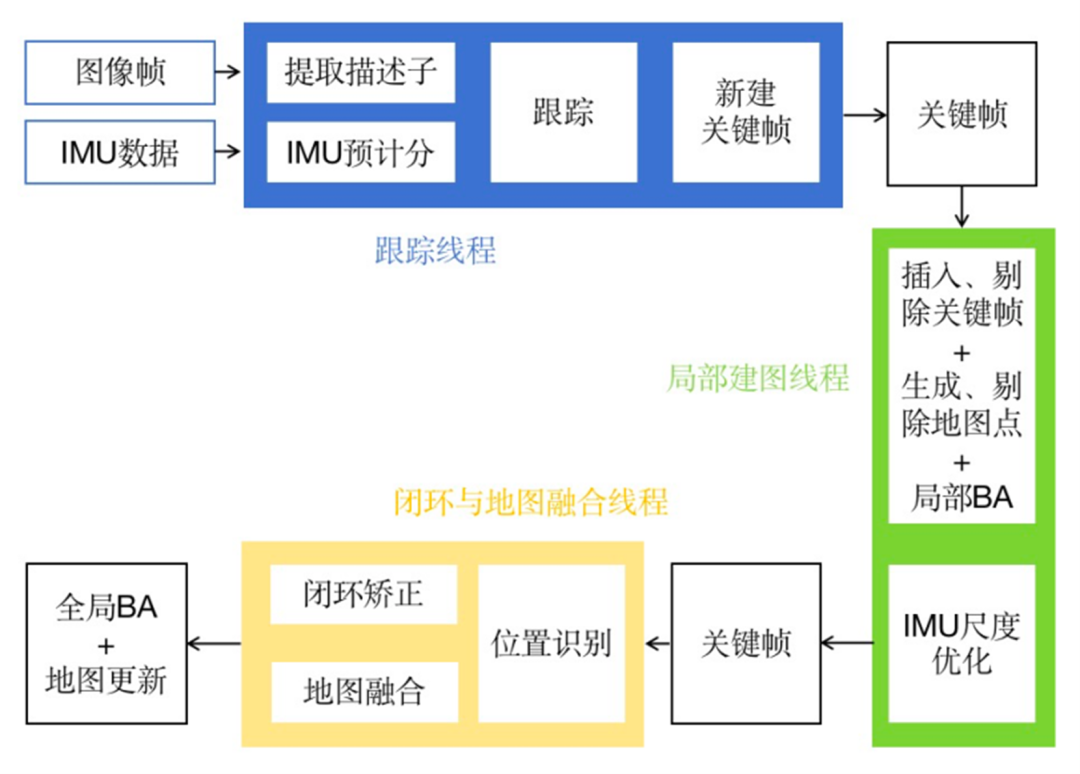
工业建模对于精度有着高要求,这意味着无人机的 SLAM 算法要提供可靠的实时位姿估计。ORB-SLAM3 是目前融合双目视觉与 IMU 的优秀算法,其前端是针对实时性优
2023-09-18 10:12

近年来,SLAM技术取得了惊人的发展,领先一步的激光SLAM已成熟的应用于各大场景中,视觉SLAM虽在落地应用上不及激光SLAM,但也是目前研究的一大热点,今天我们就来
2023-09-05 09:31