
假定设计中存在两个RP,分别为RP1和RP2,那么就要避免出现RP1输出直接连接到RP2或者相反从
2023-11-30 09:17
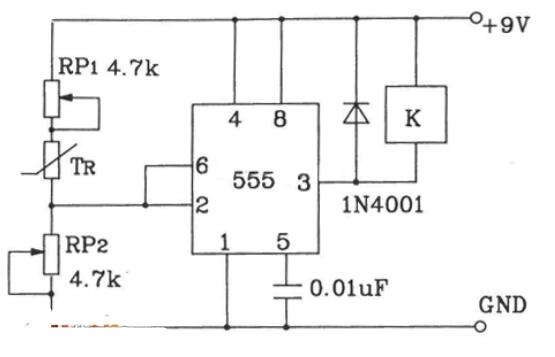
调节RP1、RP2可预置控制温度点,555时基电路构成施密特反相电路,利用继电器实现设备的自动控制。
2020-05-07 15:24
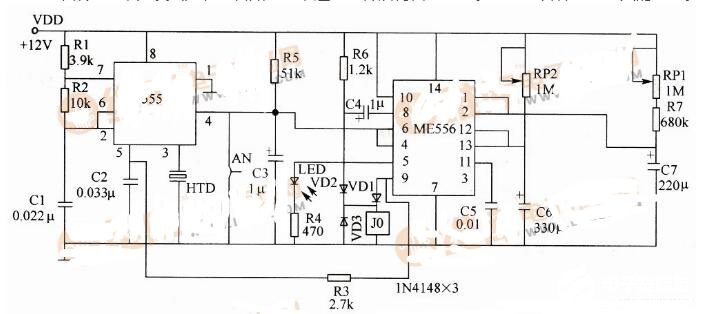
在图中,RP1、R7、C7和1/2556用于5~30min的开机定时,当电源接通后,由于C7上的电位不能突变,使定时电路置位,并开始计时,定时时间t=1.1(R7+2RP1)C7。
2020-05-06 15:49

单片机数据存储器由特殊寄存(SFR)和通用寄存(GPR)组成。SFR特殊寄存器用到cpu和外设控制器件操作,GPR通用寄存器则负责通用RAM存储寻址。直接寻址可能需要使用RP1、RP0位,间接寻址则需要用到指针寄存器(FSR)
2016-07-26 15:04

VT5,VT7接成稳压管产生基准电压,R1,RP1,R3构成取样电路,VT3为放大管,VT3,VT4为调整管。VT1与R2构成过流保护电路,正常工作时,VT1截止。
2011-07-20 09:45
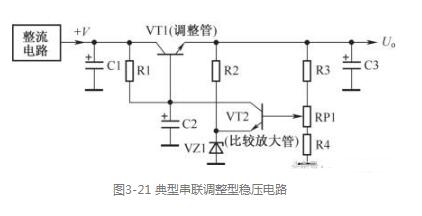
电路中,VT1是调整管,它构成电压调整电路;VZ1是稳压二极管,它构成基准电压电路;VT2是比较放大管,它构成电压比较放大器电路;RP1和R3、R4构成取样电路。
2019-10-16 17:39
如图为遥控发射电路。555集成块与R1、R2、RP1、VD1、VD2及C1组成一无稳态大范围可变占空比振荡器。图示参数的振荡频率为50Hz左右,通过
2019-05-23 08:43

电路由检测电路、信号放大电路和稳压电源电路组成。其中检测电路由电阻RH、晶体管VT以及电阻R1、R2组成;信号放大电路由A1、RP1、RP2、 R3、R4、R6、R5、
2014-09-22 09:56
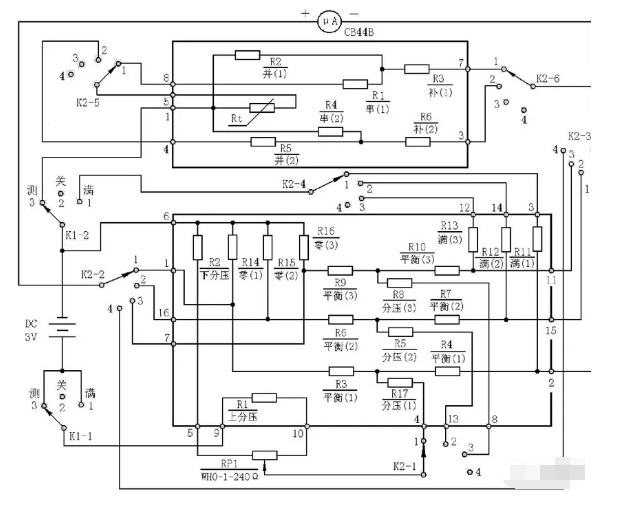
WMZ-03型温度指示仪采用桥路作为温度量测电路。电位器RP1作为满度调节;电阻R3(R6、R9)、R14(R7、R10)、R4(R15、R16)与热敏电阻组成桥路的四个桥臂;R11(R12、R13
2021-06-12 11:44
中我们知道机器人RIP的标准控制结构的阀体是不使用先导阀的直接由换向阀控制开关水,即A513/A515 . SP2 =上限值(帽被撕下) SP1 =较低的最大关断值 RP1 =较低的关闭值(阻止冷却) RP2 =上限
2023-05-22 14:54