本文介绍ROS机器人操作系统(Robot Operating System)的实现原理,从最底层分析ROS代码是如何实现的。 **1、序列化** 把通信的内容(也就是消息message)序列化是通信的基础
2023-05-19 17:42
本文介绍ROS机器人操作系统(Robot Operating System)的实现原理,从最底层分析ROS代码是如何实现的。 **1、序列化** 把通信的内容(也就是消息message)序列化是通信的基础
2023-05-19 17:41
可能很多初学者听到机器人操作系统,就被“操作系统”几个字吓住了。其实简单点说,**ROS就是一个分布式的通信框架,帮助程序进程之间更方便地通信。
2023-05-19 17:46
电子发烧友网报道(文/李宁远)对于熟悉机器人应用的读者,ROS想必定是不会陌生的。ROS可以说是目前机器人相关开源社区最流行的项目。每一种类型的
2022-04-08 08:13

本篇文章主要分析,常规的ROS机器人是如何使用Navigation导航包实现实时定位的,定位精度的决定性因素等内容,结构上分为详细介绍、概括总结、深入思考三大部分。
2023-12-03 11:00

在 ROS 中,我们可以输出带有时间戳的里程计数据,然后看机器人达到恒定的最大平移速度(ti)需要多长时间,然后使用来自里程计数据(nav_msgs/Odometry message)来计算这个过程的加速度。多做几次实验求平均值。
2023-11-03 17:04
之前一直想写一篇关于ROS机器人建图与导航仿真全过程的教程,终于有时间来做这个事啦,本人也拿过吉林省高校机器人大赛—ROS竞速组的冠军,第十六届全国智能车比赛—讯飞餐厅
2023-03-06 18:18
构建数据集的开发人员控制场景中对象、场景本身、照明和合成传感器的随机分布。开发人员还具有细粒度控制,以确保重要的角落案例包含在数据集中。最后,此工作流支持版本控制和调试信息,以便能够准确地复制数据集以用于审核和安全目的。
2022-04-19 09:57
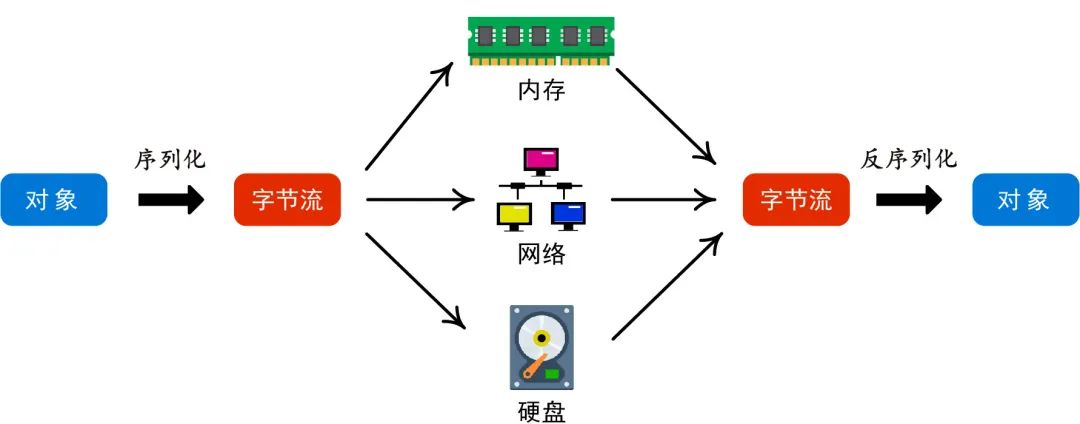
首先,为什么要序列化?或者更具体的说,既然对象的信息本来就是以字节的形式储存在内存中,那为什么要多此一举把一些字节数据转换成另一种形式的、一维的、连续的字节数据呢?
2023-01-03 10:55
