
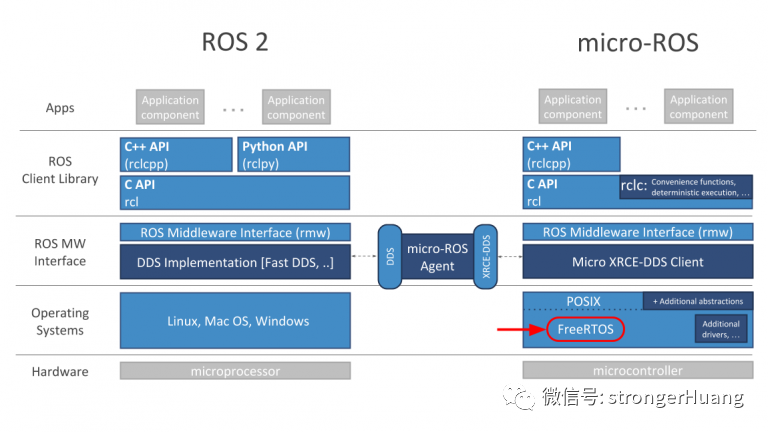
本篇文章主要分析,常规的ROS机器人是如何使用Navigation导航包实现实时定位的,定位精度的决定性因素等内容,结构上分为详细介绍、概括总结、深入思考三大部分。
2023-12-03 11:00

面对序列化,很多人心中可能会有很多疑问。 首先,为什么要序列化?或者更具体的说,既然对象的信息本来就是以字节的形式储存在内存中,那为什么要多此一举把一些字节数据转换成另一种形式的、一维的、连续的字节数据呢?
2024-04-27 02:39
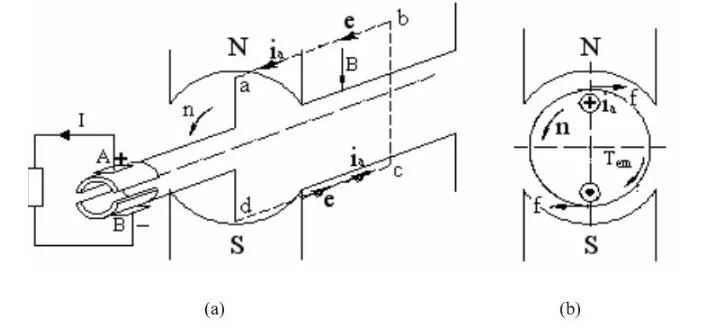
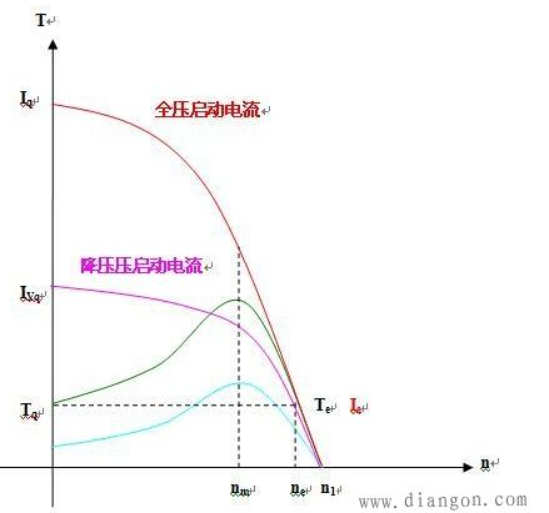
电机在整个ROS机器人系统中担任“执行机构”的角色,机器人的动力来源于电机。 在电机参数范围内,可以根据控制需求要求电机提供所需角速度和所需要的扭矩,电机都能够在较短的时间内完成响应。
2023-03-17 10:45
机器人的应用越来越广泛了,大家熟知的稚晖君直接创业搞机器人,可想而至,接下来的十年,机器人绝对是热门的行业。
2023-11-28 09:31
这篇文章一起来看看ROS移动机器人供电系统。 目前某宝常见的ROS学习套件,大都采用12V有刷直流电机,供电电压常采用3节锂电池串联后得到12.6V电压。 经过电压转换后给电机,控制器,树莓派,雷达
2023-03-17 10:55
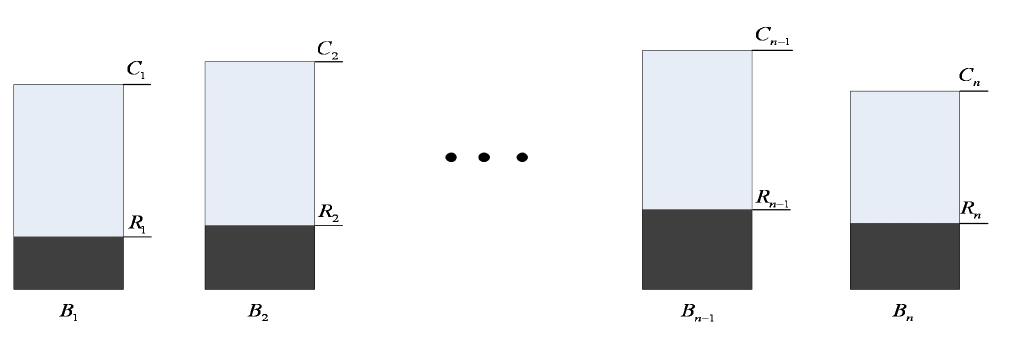
上篇文章,详细分析了ROS移动机器人最大耗电电流,并根据锂电池放电倍率,给出锂电池的推荐选型。 具体分析可以在我的公众号历史文章中查看。 这篇文章,来介绍供电系统中的锂电池均衡电路。
2023-03-17 10:55
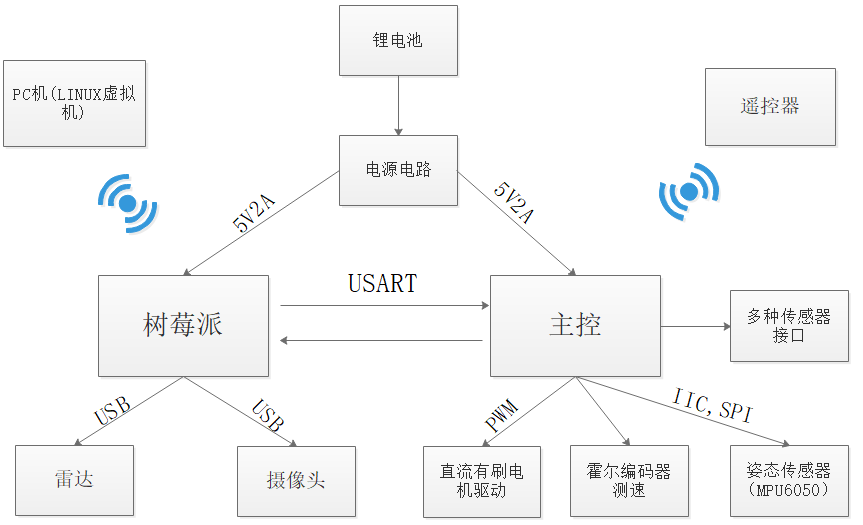
本文来聊聊ROS移动机器人中控制器与树莓派进行传输信号的通信接口电路设计。在此之前回顾下在本项目第一篇文章中提到的硬件框图。
2023-03-17 10:46
的商业价值。 在高性能边缘计算芯片和人工智能的加持下,机器人,正在从实验室走向商业落地。对于工程师而言,抓住机器人领域的快速发展的机会,才能立于不败之地。 ROS2基础入门到实践教程 硬声UP主:鱼香
2022-09-15 11:21
协作机器人只是整个工业机器人产业链中一个非常重要的细分类别,有它独特的优势,但缺点也很明显:为了控制力和碰撞能力,协作机器人的运行速度比较慢,通常只有传统机器人的三分之
2019-07-07 09:47
机器人的研发是为了协助或取代人类进行危险的工作,目前大部分的机器人都还是硬邦邦的“硬汉”形象。人们也在拓展自己的想象和创造力,去开发像“大白”一样软萌的机器人。这种利用柔软材料来制作的
2018-05-17 23:58