针对网络入侵的不确定性导致异常检测系统误报率较高的不足,提出一种基于Q-学习算法的异常检测模型(QLADM)。该模型把Q-学习、行
2009-09-02 11:58

无线传感网络存在关键区域节点能量消耗过快,节点能量供应有限以及通信链路拥塞等问题,容易造成节点故障和路由破坏。为减小上述问题对网络传输造成的影响,提出一种基于Q学习
2013-03-13 16:11
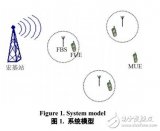
,在Femtocell与Macrocell共存的双层网络中存在同信道干扰问题,这会降低系统性能。本文首先分析了分布式Q学习算法在Femtocell与Macrocell构成的两层网络下行链路功率控制中的应用,在此基础上仿真并分析了独立
2017-12-28 11:36
基于人工情感的Q_学习算法在机器人行为决策中的应用_谷学静
2017-01-12 19:56

针对主动视觉安检方法检测性能不高和检测速度慢的问题,基于Q学习(QL)算法提出了采用状态回溯的启发式Q学习( HASB-QL)算法进行最佳视角估计。该算法引入代价函数和
2018-12-21 15:03
提出了基于Q学习的角色值方法,避免了在比赛中由于机器人之间的频繁角色转换而造成的系统效率损失及系统不稳定。该方法完善了多智能体系统的整体调整方法,有效地解决了
2008-12-16 23:53
针对无人机辅助采集无线传感器网络数据时各节点数据产生速率随机和汇聚节点状态不一致的场景,提出基于Q学习的非连续无人机轨迹规划算法Q-TDUD,以提高无人机能量效率和数据采集效率。基于各节点在周期
2021-06-02 15:24
大数据时代的数据信息呈现持续性、爆炸性的増长,为杋器学习算法带来了大量监督样本。然而,这对信息通常不是次性获得的,且获得的数据标记是不准确的,这对传统的分类模型提岀了挑战,而増量学习是一种重要
2021-05-13 14:17

机器人动态规划是指在某一个给定的运行空间中,移动机器人通过路径的动态规划来获得一条从初始位置到目标位置的最优路径。环境未知的情况下的机器人路径规划是该领域的研究难点。解决路径规划的主要研究方法包含全局规划法和局部规划方法,全局规划方法主要包括:神经网络和人工势场的方法、遗传算法和粒子群算法等。而局部规划算法主要包括含滚动路径规划和在线视点寻求方法等。全局规划方法主要解决环境己知的问题,在获取了先验知
2017-11-28 17:01
BK3431Q教程,本资料主要讲解了bk3431Q的相关介绍,包括烧录方法,资料包框架介绍,sdk代码解析等等。
2019-02-18 19:56